Paso 4: Construir la torreta de sensor









No voy a entrar en mucho detalle aquí, porque las decisiones con respecto a los tamaños y formas de los trozos de madera eran en gran parte arbitrarias. La mayoría de las curvas terminó el tamaño porque eso significaba que podía dibujar fácilmente utilizando un CD como una plantilla.
Lo más importante a entender es que la torreta de sensor se realiza mediante dos potenciómetros lineales como un par de ejes perpendiculares. Cuando el usuario mueve el puntero láser alrededor, girando sobre sus ejes x e y , el puntero gira sobre dos ejes y cambia la resistencia de los potenciómetros. El Arduino mide esta resistencia y utiliza para calcular el ángulo de la aguja.
Uno de los potenciómetros se encuentra horizontal con su eje suspendido entre dos piezas fijas de madera, capaz de girar libremente.
El eje se une por superglue una tercera pieza de madera (con forma de un círculo truncado) que se intercala entre las dos primeras piezas de madera. Como esta pieza casi circular gira entre sus vecinos, el eje del potenciómetro girará con ella y conocer Arduino de la elevación del puntero láser.
La base del potenciómetro anclada en la base de La Redpointerpor una sección de depresor de lengüeta pegada a otra pieza de madera.
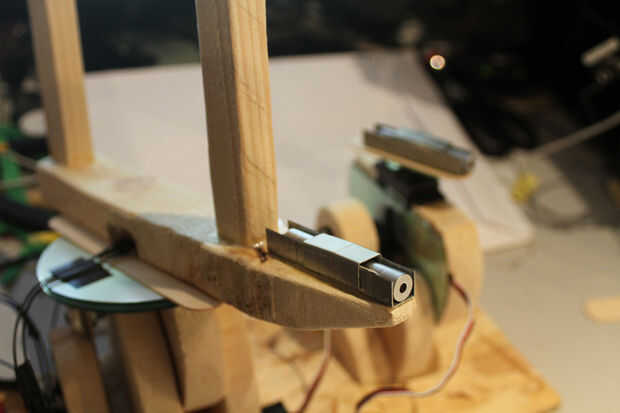
Observe la muesca semicircular poco cortada en la parte superior plana de la pieza central de madera. Hay un agujero perforado hacia abajo en la base de esa muesca justo lo suficientemente amplio como para eje de potenciómetro caber dentro. El segundo potenciómetro eventualmente se pega en el agujero, pero primero se une a otro depresor de lengua. Dos discos actúan como un cojinete entre el taco de madera y el depresor de lengua. Una vez que el potenciómetro se pega en su lugar, actúa como un sensor para la rotación lateral del puntero láser.
Con la base de dos ejes montada, un mango de pistola-como simple (hecho de tres trozos de madera pegado) se une a la parte superior. Esto permitirá que para el control simple de mano uno o dos de la torreta del sensor.












")
