Paso 5: Construir la torreta servo
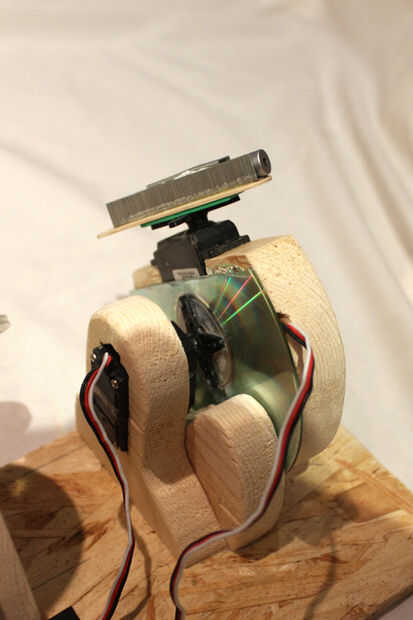





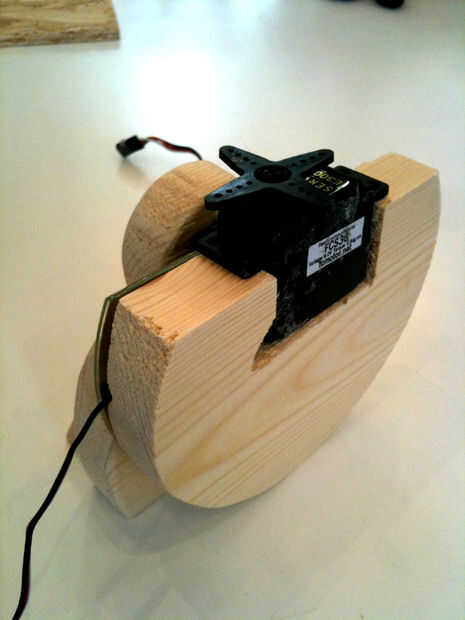
Dos servos se mantienen perpendiculares entre sí por un marco de madera. Finalmente, se unirá un puntero láser en el eje del servo superior, permitiendo que el Arduino apuntar el puntero verticalmente y horizontalmente mediante el ajuste de la posición de los dos servomotores. Un CD fue utilizado como una superficie lisa redonda conveniente pegar entre la rueda de madera y el servomotor conectado a tierra.












")
