Paso 5: Electrónica y código y sí este robot habla :)
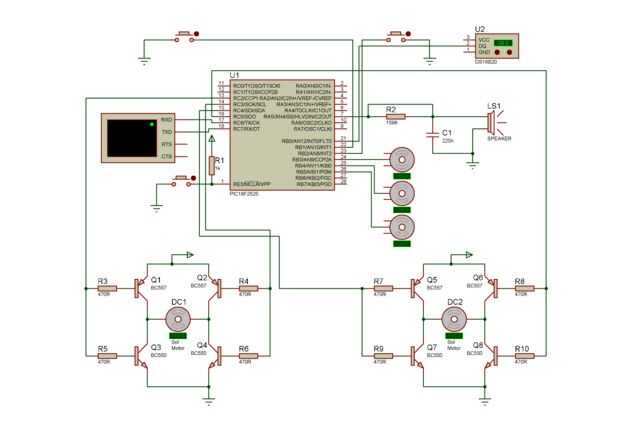
He hecho un simple circuito en proteus, tiene PIC 18F2525 regulador debido a su tamaño rom, necesitaba un mayor tamaño de rom porque quería que este robot para hablar. He utilizado las muestras de voz de warcraft que me lo he descargado de la red.
El código utiliza la clase de algoritmo de CAD uno pines para reproducir las muestras de sonido se puede convertir mediante el uso de un pin de salida digital única. Datos de muestras de sonido está incrustados en el código. Hay un filtro RC simple para mejorar el sonido de rotura producido por la salida digital del 1 pin. Un pequeño amplificador incluso puede mejorar la salida también amplificándolo.
Hay puentes de H dos de los motores de la C.C., un sensor de temperatura y un enlace serial, para la comunicación serial de bluetooth. El sensor de temperatura es para utilizar el robot como un robot de temperatura, irá a terreno inexplorado: D y la temperatura de su entorno a nuestra petición de informes. Suena científico.
Hay tres servos adicionales en el esquema, se planean para controlar el cubo de buldozer, la excavadora o anyhing otra cosa, tal vez de una cámara. Pero todavía no implementado en esta versión del código. También se ven dos interruptores parachoques, no son ya sea implementado. Pero habla, obedece órdenes enviadas a través de bluetooth, que será enouth para probar la plataforma de robot. Usted puede adaptar fácilmente a muchos otros códigos de origen que puede encontrar en internet.

 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")


")








