Paso 2: electrónica
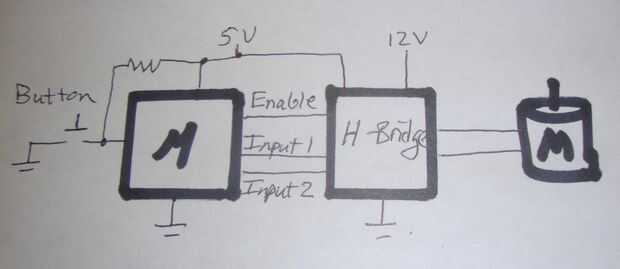
Las interfaces del microcontrolador para el puente de H que a su vez controla el motor.
He usado puente A del L298N doble controlador de puente completo (http://www.digikey.com/product-detail/en/L298N/497-1395-5-ND/585918?WT.z_cid=ref_octopart_dkc_buynow).
Incluye un pin, A activar, que cuando baja, se apaga el motor.
Se establece el alta/baja entrada entrada 1/2 para prepararse para dar vuelta hacia la derecha. y baja para el contador horario. El botón está ligado a una resistencia de pull-up y conectado a tierra cuando presiona. Configuración permiten una alta obtiene el motor funcionando, en busca de aventura.
Se utilizó un microcontrolador PIC16F88 pero más cualquier otro haría igualmente.
En la foto es el esquema simplificado. Software está escrito en JAL que sigue en su totalidad...
-Este programa es para controlar el rayo de cyclo Roscadora
--para el semiautomático habló proyecto máquina roscadora en instructables
-por Carlitos
--B2 es botón de entrada ligada a resistencia pullup. Botón se utiliza normalmente es el
--tan normalmente que está en tierra. Tecla hace entrada a alta.
--que dispara el ciclo de control del motor
-B4 es habilitar motor (alta está habilitada)
-B6, B7 es la dirección del motor donde alto-bajo es hacia la derecha y hacia la izquierda baja y alta
-ciclo de control del motor:
-- 1. activar motor para correr hacia la derecha
-- 2. correr hacia la derecha para x segundos
-- 3. plazo hacia la izquierda para x + delta segundos
-- 4. desactivar el motor
incluyen 16f88
--establecer todos IO como digital
enable_digital_io()
pragma blanco reloj 8_000_000
objetivo de pragma INTOSC_NOCLKOUT OSC
OSCCON_IRCF = 0b_111
objetivo de pragma WDT deshabilitado
-Pins salida
pin_b4_direction = salida--activar motor
pin_b6_direction = salida--motor i1
pin_b7_direction = salida--motor i2
--Entrada de clavijas
pin_b2_direction = entrada--botón con resistencia de pullup utilizado para accionar el motor
incluyen retraso
var palabra delayclockwise = 90
var palabra delaycounterclockwise = 100
pin_b4 = bajo--deshabilitar motor
pin_b6 = alta--ajuste de la derecha
pin_b7 = baja--ajuste de la derecha
para siempre del lazo
Si pin_b2 == alta luego, presiona el botón
delay_100ms(5)
pin_b4 = alto--activar motor
delay_100ms(delayclockwise)
pin_b4 = bajo--deshabilitar motor
pin_b6 = bajo - fijó para la izquierda
pin_b7 = alto - fijó para la izquierda
pin_b4 = alto--activar motor
delay_100ms(delaycounterclockwise)
pin_b4 = bajo--deshabilitar motor
pin_b6 = alta--ajuste de la derecha
pin_b7 = baja--ajuste de la derecha
terminar si
delay_100ms(1)--espera un poco antes de que botón de interrogación
bucle final













