Paso 5: Deja que la diversión comienza...
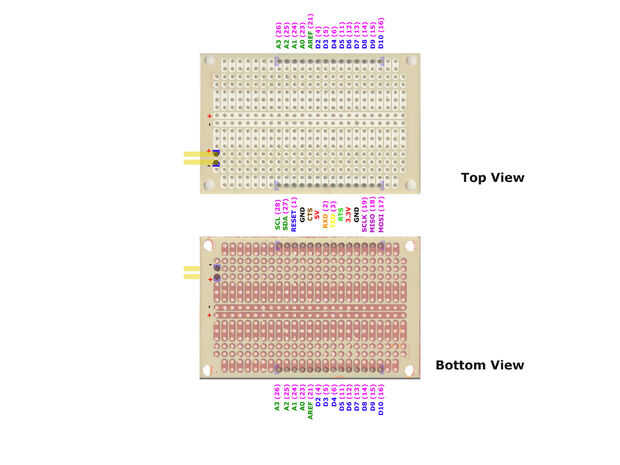
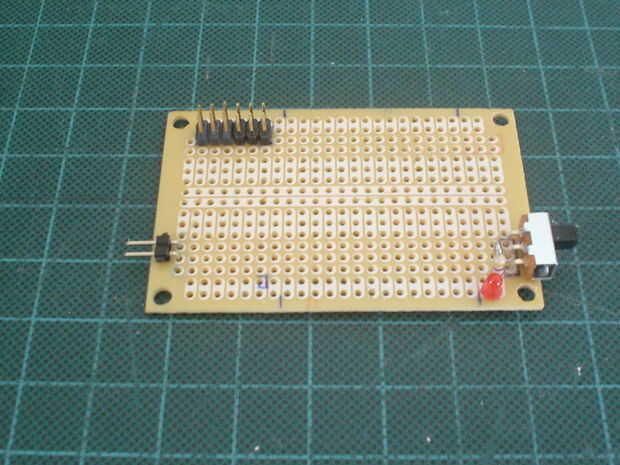
Primer componente que he añadido a mi tarjeta de controladora de motores es el conector de alimentación (JP4).
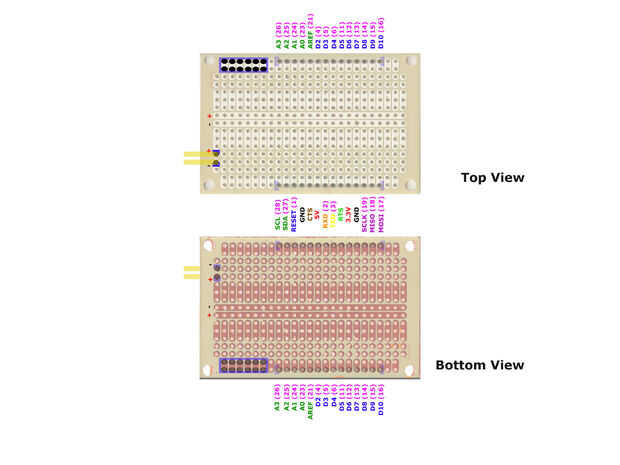
Segundo componente agregué fue JP2 - motores 2 x 6 y LED Conector de borde de brazo robótico.
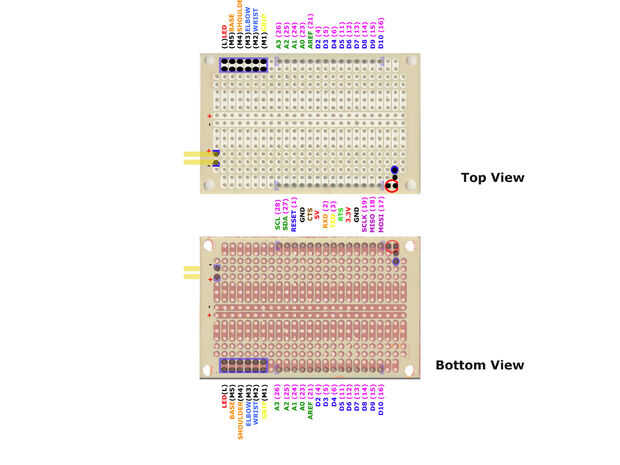
Siguientes componentes agregados fue LED1 - LED de indicador de fuente de potencia del Motor y luego R1 - resistencia de 1K.
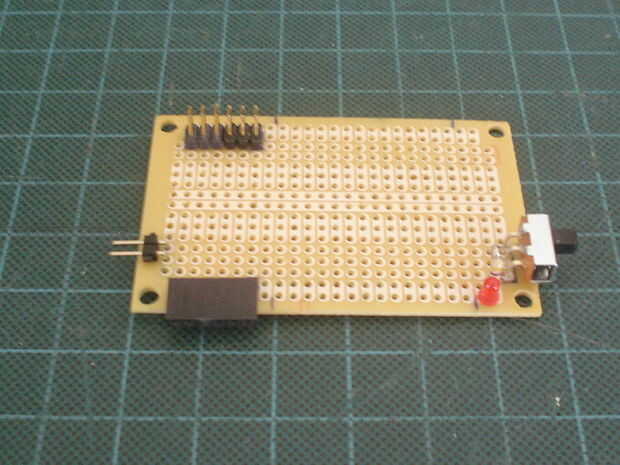
Luego he añadido S1 - Motor interruptor de encendido.
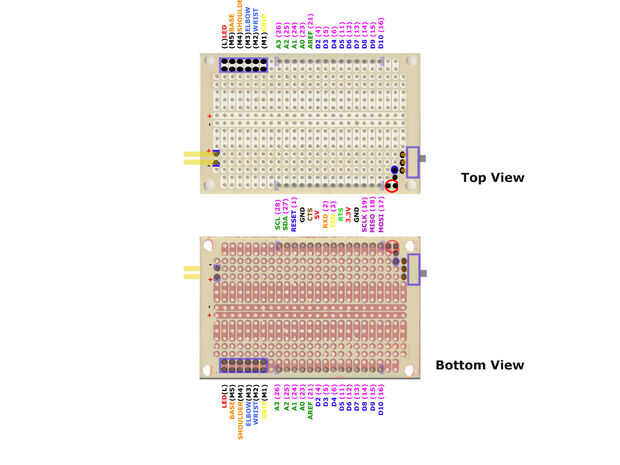
Y conector hembra de 6 pines para un conector listo para Bluetooth. (opcional)





")






