Paso 7: Controladores de Motor
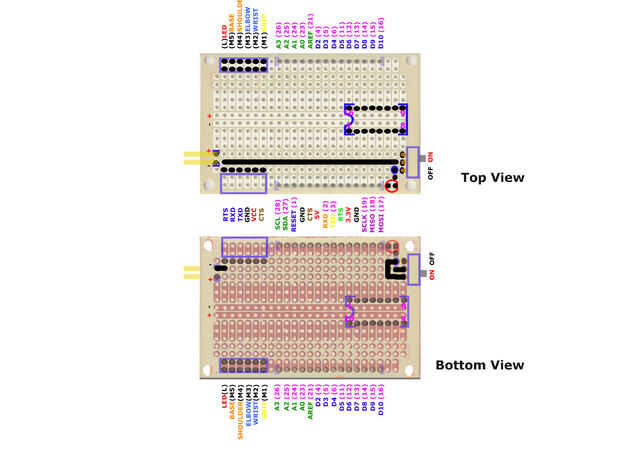
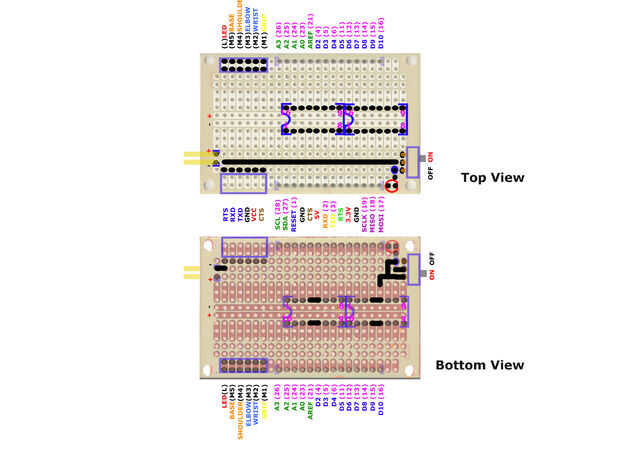
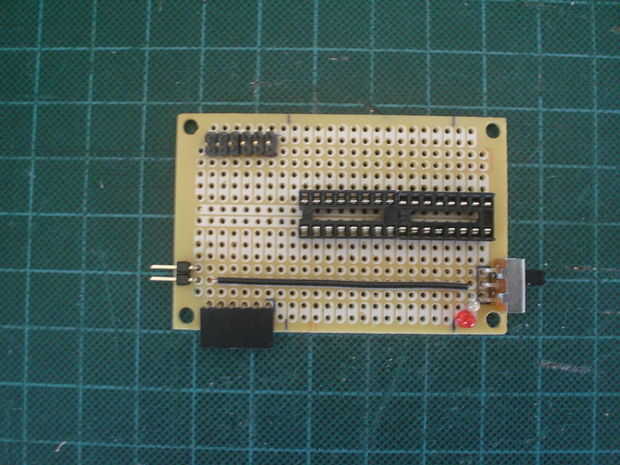
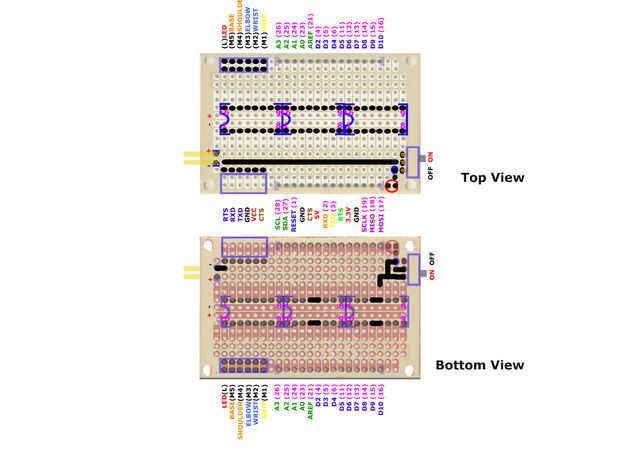
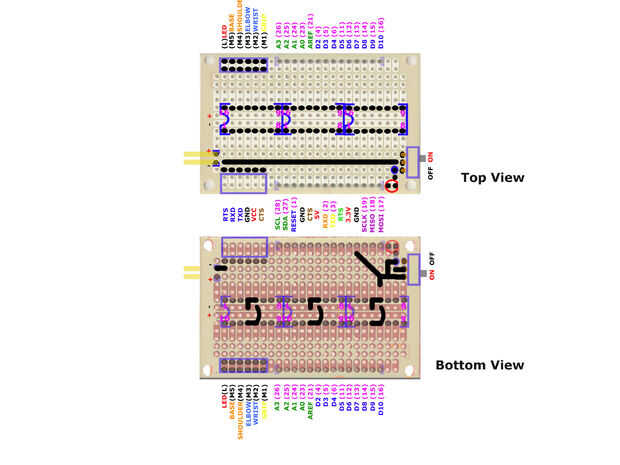
A continuación, añadí segundo puente H IC. Este controlador de motores se usan para controlar codo (M3) y hombro(M4). Y también conectar los pines de tierra del puente H IC (pin 4, 5, 12 y 13).
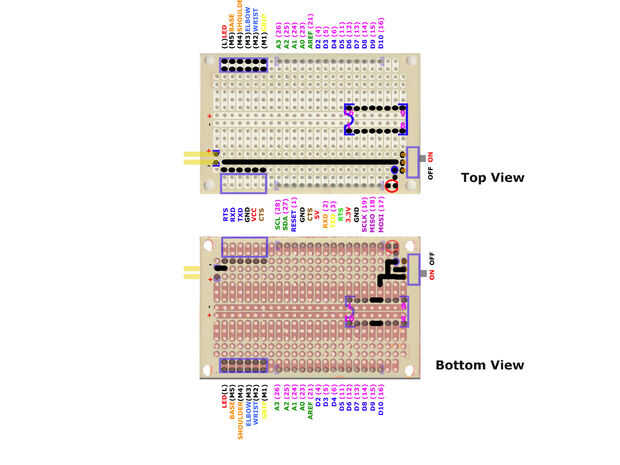
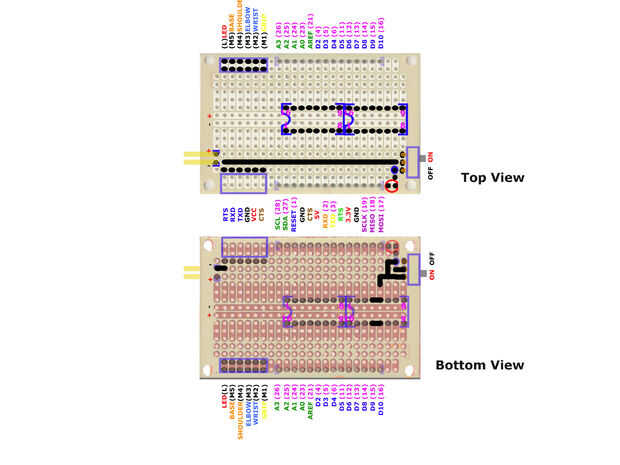
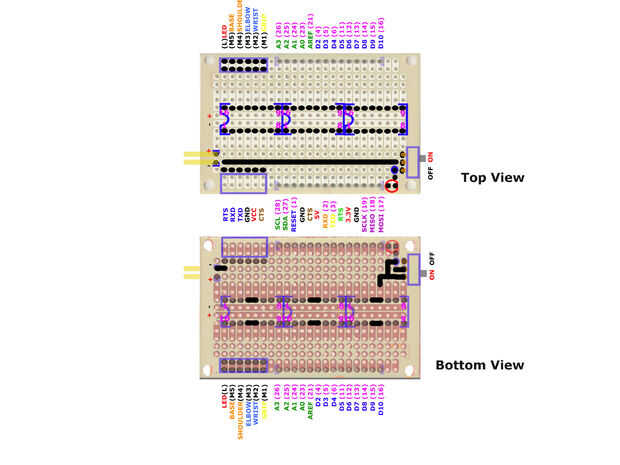
Y he añadido el tercer puente H IC. Este controlador de motores sirven para control solamente un último motor del brazo robótico, Base (M5). Otra vez conecté los pines de tierra del puente H IC (pin 4, 5, 12 y 13).
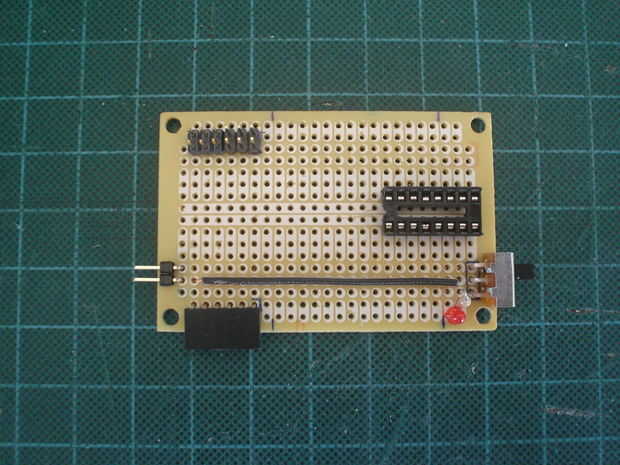
Después de conecté toda la tierra juntos.





")






