

En este blog vamos a tener la información que aprendimos en el anterior post del blog el post titulado "Make: es robótica Starter Kit-Software parte 2 y capturar datos de sensores en tiempo real y enviar estos datos a nuestro ordenador de forma inalámbrica.
Para completar esta sección necesitamos comprar algunos artículos:
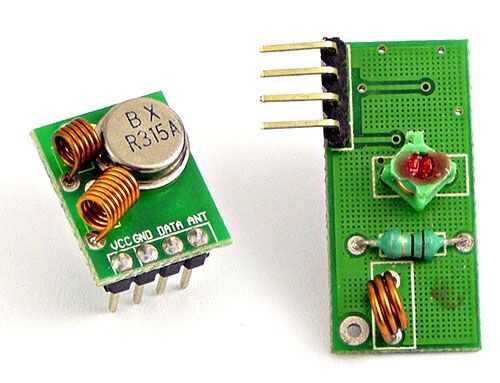
RF Radio transmisor y receptor, (5 voltios, no es un 3,3 voltios)
Cables jumper hembra macho
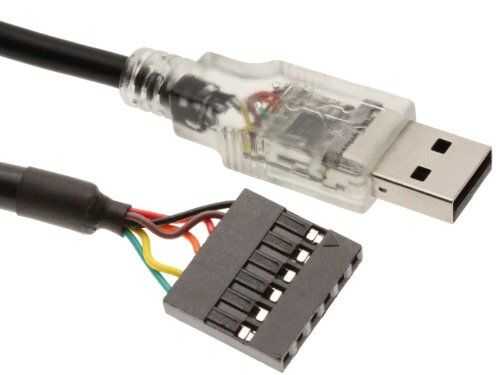
Además necesitaremos el cable USB FTDI o un dongle USB FTDI.
Hice un poco de búsqueda en la web y encontró un kit RF datos módulo Tx/Rx. Este kit tiene un transmisor de 315 MHz y receptor. Pagué $9,00 más gastos de envío para este kit.
(Click en las imágenes para hacerlas más grandes)
Este adaptador FTDI USB macho sería más compactan y tienen un factor de forma más agradable para tu ordenador. Pero puesto que ya tenía el cable USB FTDI voy a utilizar para el tutorial. Más adelante si desea realizar una configuración permanente, siempre puede pedir la versión masculina del adaptador FTDI.
Usted puede comprar cualquier kit de transmisor/receptor de frecuencia siempre y cuando las frecuencias son las mismas entre el transmisor/receptor. Este post del blog explicaremos en detalle cómo conectar las radios de RF con el robot y el ordenador. Vamos a hacer unas pequeñas modificaciones a nuestro programa original de lineFollow.ino. Pero los cambios para conseguir el robot comunicarse con las radios RF es bastante fácil.
Pásate por mi blog para obtener más información:
http://joepitz.wordpress.com/













