Paso 3: Anote los datos del Sensor
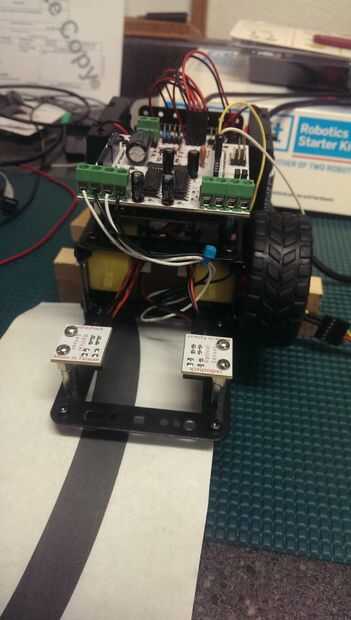
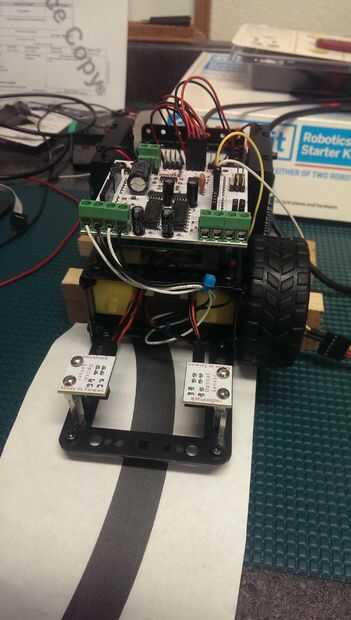
He colocado mi robot en un conjunto de bloques para levantar las ruedas del suelo así que puedo lateral de papel bajo los sensores.
Observe también que he fotocopiado una pequeña sección de la línea negra del círculo. Vamos a usar esta linea para medir lo que están leyendo los sensores en nuestras pruebas.
Observe que se ha eliminado la rueda derecha. El libro descansa sobre la rueda para conseguir la línea cerca de los sensores. Centro de la línea negra entre los sensores ya que queremos obtener una lectura de blanco en ambos sensores primero.
Cuando estas pruebas que no es necesario encender las baterías, así que las ruedas no van a girar. Pero los sensores van para funcionar bien.
Abra el IDE de Arduino si no se abre ya. Enchufe simplemente el cable usb que utilizas para programar su robot para el puerto USB de la Arduino. Si está ejecutando Windows,
Abra la utilidad de administrador de dispositivo, Panel de Control -> sistemas y seguridad -> Administrador de dispositivos. Expanda el icono puertos (COM & LPT). Tenga en cuenta que puerto COM tu Arduino está conectado a. Anote este puerto. Ahora Conecte el cable FTDI USB a su PC.
Abra el administrador de dispositivos y anotar el puerto COM de su cable USB FTDI. Abra las herramientas -> Puerto de menú en el IDE de Arduino y seleccione el puerto adecuado para su cable USB FTDI.
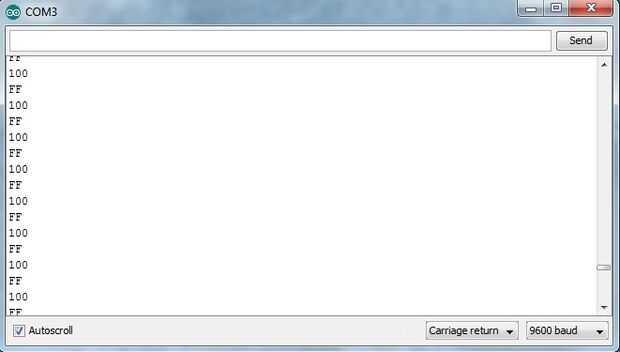
En mi equipo fue el puerto COM 3. Ahora seleccione el herramientas -> Serial Monitor de menú y seleccione una velocidad en baudios de 9600 en la esquina inferior derecha. Si hiciste todo correcto veremos la salida en la siguiente imagen.
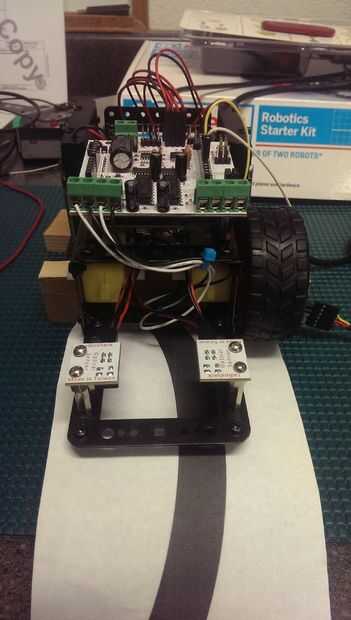
Ahora mover el papel por lo que es la línea negra debajo del sensor de la derecha, anote sus mediciones y luego hacer lo mismo para el Sensor izquierdo.
Después de tomar todas las medidas debe tener un total de 6 lecturas del sensor:
Izquierda y derecha las medidas se toman en la parte delantera del robot.
Centro = FF y 100
Derecha = FF y 1FF
Izquierda = 0 y 100
Estos número en hexadecimal, lee mi tutorial y los enlaces que apunta a. Próximo Instructble será tomar nuestras lecturas de sensor y ejecutarlos a través del programa ReadOptical.py.







")





