Paso 1: Línea siguiente Robot
Cuando llegué a casa me rompió abierto la caja rápidamente y empezó a buscar sobre el contenido. El kit viene con todo que lo necesario para la construcción de dos robots con la excepción de un Arduino Uno y 8 pilas AA.
En el Starter Kit se puede construir ya sea una línea después de robot o un robot andante. Elegir para la construcción de la línea siguiente robot primero. Tardé dos tardes tranquilamente para armar el robot. Las instrucciones eran grandes. Todas las piezas del robot fueron de primera clase, la estructura del robot es soportes planos y ángulo de metal cubierto polvo negro similar erector set estilo.
Las piezas de plástico sólo eran las cajas para baterías, las ruedas y los casos de motor. La única observación fue con las manos tamaño adulto fue un poco duro de los esquina tuercas y tornillos de fijación. Pero si está ayudando a su hijo o hija con los pasos de construcción, esto será ideal para pequeñas manos. Una vez que termine cualquier robot del edificio, hay un enlace en el manual de donde puede descargar el software para el robot. Dentro de esta descarga hay algunos programas de ejemplo, un archivo Léame y esquemas de los circuitos de los sensores y el protector del motor/sensor. No se dispone de ninguna documentación sobre el hardware, que consiste en un controlador de motor de Arduino, protector del sensor. Para obtener las especificaciones debe leer el esquema.
Para la persona que quiere tomar el robot proceso más allá de solo montar los kits suministrados y ejecuta el software proporcionado, hay poca información proporcionada. Usted debe averiguar esto por ti mismo, consultando el esquema, un poco desalentador para alguien empezando con la electrónica. La carga de la línea de programa, para el Arduino es fácil usando el IDE de Arduino o si eres un usuario avanzado puede utilizar uno de varios paquetes de desarrollo disponibles como libremente disponible estudio de Atmel, que es lo que uso. En mi próximo post voy a más en el software proporcionado de ingeniería inversa.
Después de rastrear a 8 pilas AA mi robot estuvo listo ejecutar run. El Kit de robótica hacen: es incluso viene con una hoja de papel blanco resistente, con un círculo de 360 grados de la línea siguiente robot a seguir. Las instrucciones indican que los sensores ópticos que cuentan con la línea que sigue el robot son muy sensibles a la luz un if el robot no está funcionando correctamente para bajar la luz ambiental alrededor del robot. Coloqué el robot sobre el papel blanco, justo al lado del círculo negro y enciende el robot.
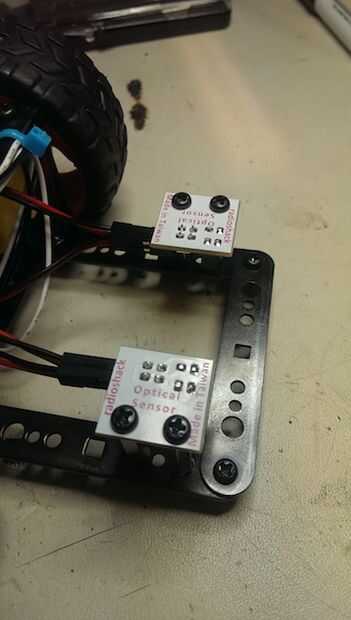
Mi robot sólo sería aproximadamente 1/4 la forma alrededor del círculo antes de perder la pista de la línea negra. Yo cansado varias veces, pero aún sin suerte. Apagué las luces de la habitación y lo intentó de nuevo. Todavía ninguna suerte. Doble revisé mi cableado y todo el cableado se instaló bien. Pero lo mejor que podría hacer el robot era solamente cerca de 1/4 alrededor del círculo de la línea negra. Tiempo para hacer algunas modificaciones: aquí está una imagen del robot stock con los sensores expuestos a la luz ambiente.













