Paso 5: Hacer las alas
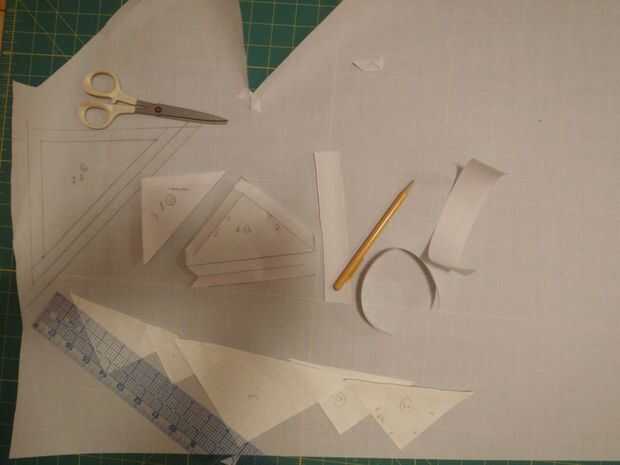
Usando los diseños de papel, los márgenes se agregan para crear nuevos patrones de papel. Cuatro de cada tamaño de las formas del triángulo se cortan, dos juegos de dos para cada lado. Dos triángulos son cosidos juntos en dos de los tres lados y el tercer lado escondido dejar la forma abierta como un bolsillo. Todos los triángulos se colocan y clavados en la espalda del vestido y cosidos con bolsillos hacia adentro para ocultar la estructura de alambre.
Moviendo las alas
Investigué varias opciones para mover las alas como motores eléctricos con las aletas, las palancas y alambre muscular. El desafío en este proyecto era que queremos movimiento confiable, pero el vestido se mueve y es suave. Colocó en última instancia sobre el uso de servos ya que eran fáciles de garantizar y controlar el movimiento. Usted puede subir con un mejor movimiento... me avisan!
Pesado del calibrador alambre está doblado en los bolsillos del ala con un gancho en la cintura. Los servos son conectados a los ganchos y luego con el mismo conector de Arduino para garantizar el movimiento simétrico a cada lado.
Los servos no dan realmente las alas un 'alboroto', sino un agradable movimiento slowish.
Código de Arduino para Servos:
#include < Servo.h >
Servo myservo; crear objeto servo para controlar un servoestablecer números de pin:
const int servoPin = 9; Pin de servos (utilizando uno de los pines tanto para movimiento del espejova a cambiar las variables:
int servoCounter = 0; posición inicial de servosvoid setup() {}
myservo.Attach(servoPin); se fija el servo en el pin 9 al objeto servovoid loop() {}
SERVOS (basados en el barrido)
para (int servoCounter = 0; servoCounter < 15; servoCounter ++) {//repeat este patrón 15 veces
para (pos = 0; pos < 180; pos += 1) / / va desde 0 grados a 180 grados
{/ / en pasos de 1 grado
myservo.Write(POS); Dile el servo a la posición en la variable 'pos'
Delay(1); 1ms - muy rápido para que el servo a la posición de espera
}
para (pos = 180; pos > = 1; pos-= 1) / / va de 180 grados a 0 grados
{
myservo.Write(POS); Dile el servo a la posición en la variable 'pos'
Delay(1); espera 11ms para el servo a la posición
}
}


")




")



