Paso 1: Hacer un marco de cabeza y el cuerpo









Herramienta y material.
-servo 16, 8 servo de alta Tor, 4 Palanca servo 4micro servo. (en mi tutorial usar 6 alta Tor ang 2 alta modificación la caja de engranajes)
-rompe cabeza robo sapien, o usted puede hacer de bola de pingpong o stc.
-microcontrolador un cámara de la ayuda, yo uso Ez-tablero (es fácilmente y simple utilizar para nuevos) puede utilizar arduino, frambuesa o stc
-flatt agua tubería Pvc, se aplana, se puede ver en mi último instructables
-scirssors
transparan - botella plástico
-fuerte pegamento (pegamento plástico)
-ruller y lápiz
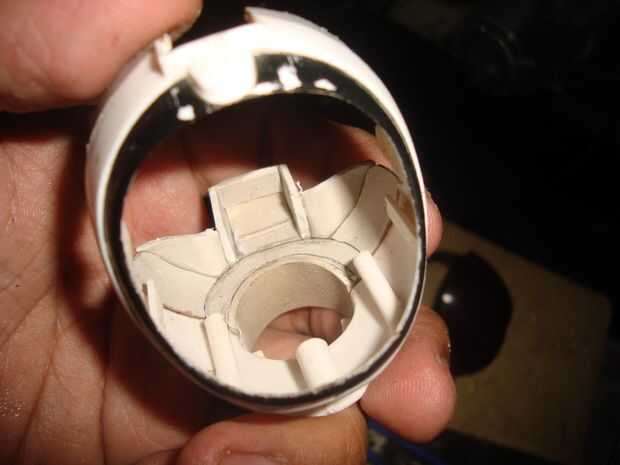
para abetos sacar la cabeza en bodi robosapien roto y corte. Utilice el cabezal trasero de cara nueva y el casco de vidrio para la cabeza posterior. no utilizamos la cara de robosapien. el nuevo jefe que agregando un protector de cámara y un micro servo para el movimiento horizontal así que necesitamos hacer un control para servo. ver en el cuadro no 4:57.
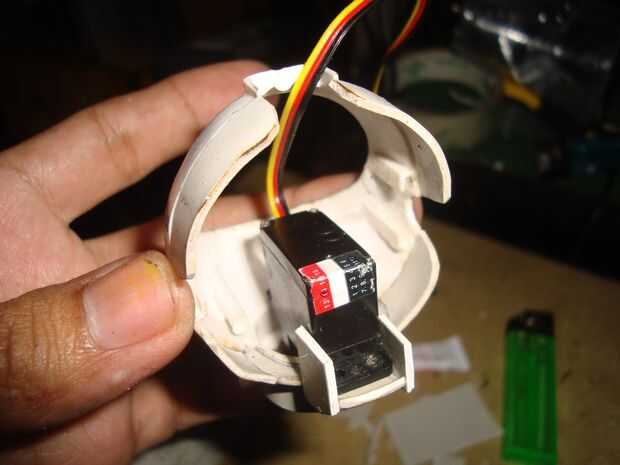
para la cara utilizar botella de plástico transparn, corte y forma de personalizar la botella en la cabeza. aplicar y pegar la siguiente poner una micro servo y un escudo de cámara (no cuadro 6-9).
Ahora agregue el scond micro servo para movimiento vertical y conecte con el horizontal servo miro en la cabeza usando el soporte de conector.make de servo de julio para el segundo servo y servo de términos de referencia de hihg 2 puesto en la derecha y la izquierda para la carnaza (im uso un nodification caja de engranajes). (cuadro 10-11)
https://www.youtube.com/watch?v=yWFJszX5MC0
")









")


