Paso 8: programación
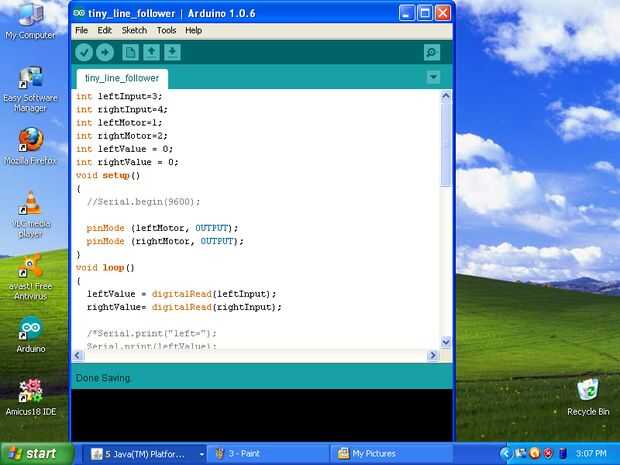
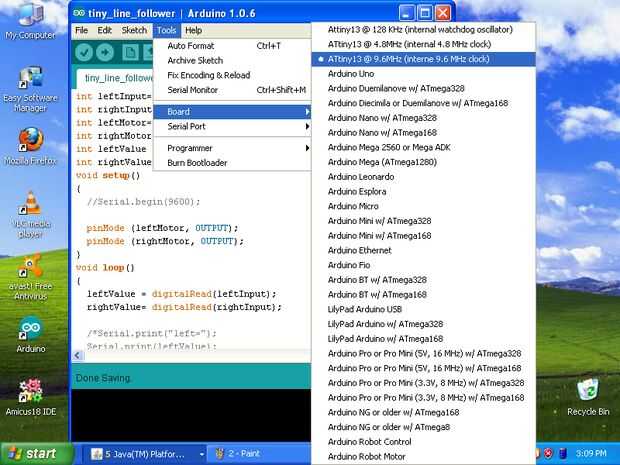
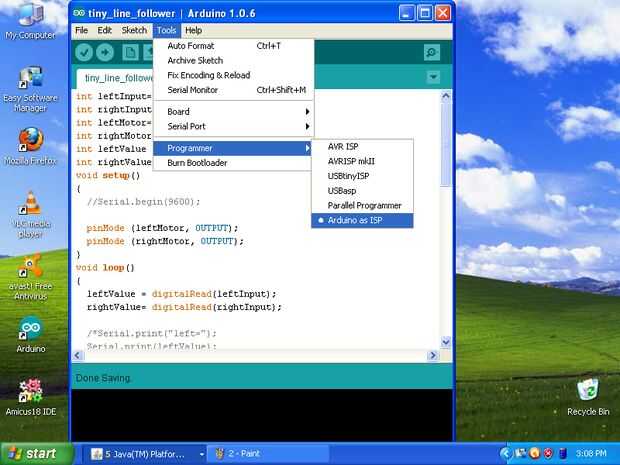
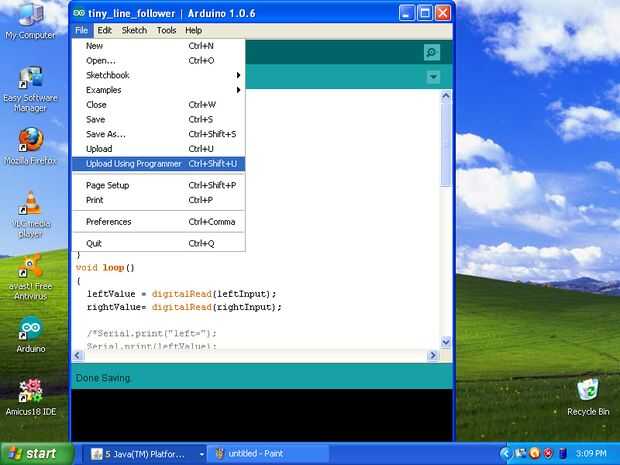
Puesto que hay solamente pocos pins en ATtiny necesitamos cambiar el programa.
Código:
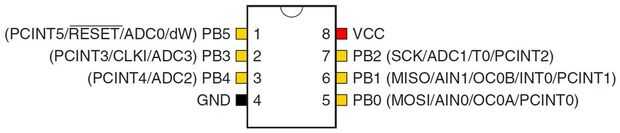
int leftInput = 3; Lee el valor del pin 3 como sensor izquierdo
int rightInput = 4; Lee el valor del pin 4 como sensor derecho
int leftMotor = 1; controla el motor izquierdo mediante la lectura y procesamiento de la entrada de valor por los sensores
int rightMotor = 2; controla el motor adecuado mediante la lectura y procesamiento de la entrada de valor por los sensores
int leftValue = 0; el valor a cero
derechovalor int = 0; el valor a cero
void setup()
{
pinMode (leftMotor, salida);
pinMode (rightMotor, salida);
}
void loop()
{
leftValue = digitalRead(leftInput);
derechovalor = digitalRead(rightInput);
Si (leftValue == alto & & derechovalor == HIGH)
{
digitalWrite (leftMotor, HIGH);
digitalWrite (rightMotor, HIGH);
}
Else {}
Si (leftValue == baja & & derechovalor == HIGH)
{
digitalWrite (leftMotor, bajo);
digitalWrite (rightMotor, HIGH);
}
Else {}
Si (leftValue == alto & & derechovalor == LOW)
{
digitalWrite (rightMotor, bajo);
digitalWrite (leftMotor, HIGH);
}
Else {}
Si (leftValue == baja & & derechovalor == LOW)
{
digitalWrite (rightMotor, bajo);
digitalWrite (leftMotor, bajo);
}
}
}
}
}
")











