Paso 2: El Motor DC sin escobillas
He resaltado y en negrita lo jugoso que te necesita, pero por continuidad es probablemente bueno grunge a través de él de todos modos.
Física Motor cepillado de la C.C.
Tal vez la mejor cartilla de motor DC que he visto (que no estoy prejuiciado , prometo chicos! Promesa de Pinky! ) es las notas del MIT OpenCourseware de 2.004: dinámica y Control II. Tomar una lectura a través de él a su propio ritmo, pero la escaleta básica es que un motor cepillado de la C.C. es un transductor bidireccional entre energía eléctrica y energía mecánica que se caracteriza por una constante motorKm y una resistencia internaRm. Por simplicidad, no se considerarán motor inductancia L . Básicamente si sabes Km y Rm y algunos detalles sobre la fuente de energía, más o menos puede caracterizar el motor entero. \
Actualización 06/10/2010: el enlace original de documento año 2.004 está muerto, pero uno aquí está que es más o menos la misma content-wise. También de MIT OCW.
La constante motor Km contiene información acerca de cuánto torque el motor producirá por amperio de corriente (Nm /) así como cuántos voltios el motor va a generar a través de sus terminales por la velocidad de unidad que gira en (V / rad / s, o Vs / rad, o simplemente V * s). Esta "constante de FCEM" es numéricamente igual a Km, pero algunas veces llamado Kv.
En un motor de la C.C., Km está dada por la expresión
Km = 2 * N * B * L * Rdonde N es el número de lazos completos de alambre interactuando con el campo magnético permanente de la fuerza B (medido en Teslas). Esta interacción ocurre a través de una cierta longitud L , que es generalmente la longitud de sus imanes y un radio R es el radio de su inducido del motor. El 2 viene del hecho de que su vuelta de cable debe cruzar y luego volver a través de la zona de influencia magnética para cerrar en sí mismo. Esta R no tiene nada que ver con Rm, por cierto.
Como un aparte, utilizaré sólo unidades del SI (métrico!!!!!!) aquí porque sólo son mucho más fáciles trabajar con para la física.
Echemos un vistazo a la expresión km otra vez. Sabemos desde la última página que
Pe = V * I y Pm = T * ω
En el motor ideal de 100% de eficiencia (el transductor perfecto), Pe = Pm, porque poder es igual a la energía hacia fuera. Por lo tanto
V * I = T * ω¿Donde hemos visto esto antes? Algunos valores de intercambio:
V / ω = T / I
KV = Km¡ Oh snap.
Para llevar esto es que sabiendo algunas dimensiones claves de su motor: la fuerza del campo magnético, la longitud de la interacción magnética, el número de vueltas y el radio de la armadura, se puede realmente estadio su rendimiento motor figuras generalmente a un factor de 2.
Ahora es el momento para...
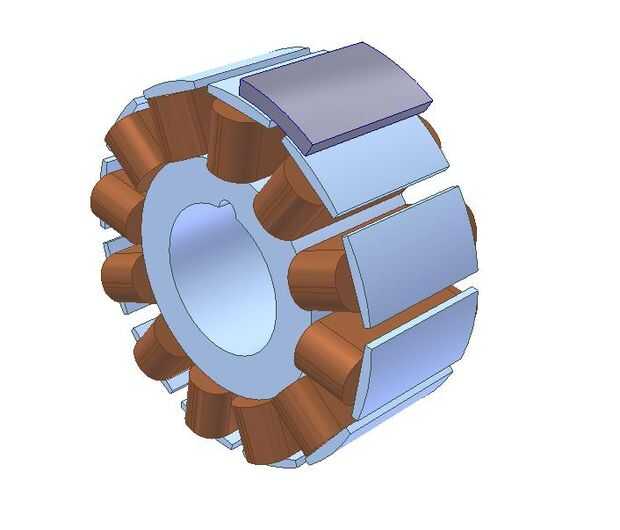
El Motor DC sin escobillas
Los motores BLDC se encuentran en la zona gris de torpe entre motor de corriente continua y motores de corriente alterna. Hay desacuerdo considerable en la comunidad Ingeniería motor sobre cómo una máquina que se basa en tres corriente alterna puede ser llamada un motor de CC y EE. El factor diferenciador para mí personalmente es:
En un motor de CC sin escobillas, conmutadores electrónicos sustituir el interruptor mecánico del cepillo y cobre eso Ruta de la corriente a las bobinas correctas en el momento correcto para generar un campo magnético giratorio. La única obligación de la electrónica es emular el conmutador como si la máquina fuera un motor de corriente continua. No se intenta usar métodos de control de motor AC para compensar las características de la AC de la máquina.
Esto me da una excusa para utilizar métodos de análisis motor DC rudimentarily diseñar Motores BLDC.
Reconozco que no tengo conocimiento profundo de máquinas BLDC o AC. En otro osado acto de outsourcing, le animo a leer increíble 350 algo página tesis de James Mevey sobre todo lo que siempre quisiste saber sobre motores sin cepillo siempre. Así, en serio nunca.
Hay un montón de cosas no es necesario saber en que, sin embargo, tales como obras de control campo-orientado cómo. Lo que es extremadamente útil en entender los motores BLDC es la derivación de sus características de par de páginas 37 a 46. El corto Resumen de cómo funcionan las cosas en un motor BLDC es que un controlador electrónico envía corriente a través de dos de las tres fases del motor en un orden que genera un campo magnético giratorio, algo realmente trippy-culo que se ve como
.
La razón que consideramos dos fuera de tres fases es que tiene un motor de fase 3 , fundemantally, 3 conexiones, dos de los cuales se utilizan en cualquier momento. Aquí es un buen ejemplo de las posibles configuraciones de cableado de fase 3. Corriente debe entrar en una conexión y por el otro.
En el Mevey 38, ecuación 2.30, el esfuerzo de torsión de una fase del motor de BLDC es dada por
T = 2 * N * B * Y * i * D/2
donde Y ha reemplazado a L en mi anterior ecuación motor DC y D/2 (mitad del diámetro de rotor) sustituye a R.
Si lo haces mi camino, se convierte en
T = 2 * N * B * L * R * i , sustitución de D/2 con R.
Recuerde que dos fases del motor a corriente fluye en él. Por lo tanto,
T = 4 * N * B * L * R * i
Se trata de las ecuaciones a saber para la estimación simple de par motor BLDC. Producción de esfuerzo de torsión máximo es (modestamente) igual a 4 veces el:
número de vueltas por fase
fuerza del campo magnético permanente
longitud del estator / base (o el imán, si son iguales)
radio del estator
corriente en los devanados del motor
Como era de esperar, esta escala linealmente con la corriente. En la vida real, esto probablemente te llevará dentro de un factor de dos. Es decir, su producción de torsión real podría estar entre este teórico T y T/2
¿Espera, 4? ¿Significa si enciendo mi motor cepillado de la C.C. en un motor sin escobillas, pronto tendrá dos veces el par? No necesariamente. Se trata de una construcción matemática - bobinados de un motor de corriente continua se consideran de manera diferente que hace que la definición de N y L para cambiar.
A continuación, vamos a ver cómo utilizar esta ecuación para el tamaño de su motor.
Actualización 28 de julio de 2010 a la definición de T
En la ecuación T = 4 * N * L * B * R i, la constante 4 viene de la derivación de un motor con solo un diente por fase, suponiendo que N es el número de vueltas de alambre por diente en el estator.
La derivación completa de esta constante implica cada bucle de cable realmente con dos secciones de cable, cada uno de longitud L. Esto es debido al hecho que un bucle consiste en regresar en el estator, luego otra vez. Siguiente, en un motor BLDC, dos fases son impulsadas siempre, por lo tanto contribuir par.
Podemos observar que en un motor con solo 1 diente por fase (un estator 3 dientes), hay factores multiplicativos no más. Sin embargo, para cada diente añade por fase (2 dientes por fase de un estator de 6 dientes, 3 dientes por fase de un estator de 9 dientes, etc.) la constante anterior debe multiplicarse por consiguiente. La constante frente a la ecuación representa esencialmente el número de pases activos del cable, que es 2 pasos por loop veces las 2 fases tiempos activos número de dientes por fase.
Por lo tanto, lo que realmente quiero decir es que T = 4 * m * N * B * L * R * i donde
m = la cuenta nuevamente definido dientes por fase .
Como las bobinas se tienen todavía ser introducido, tenga en cuenta el número de dientes por phasein la bobina dLRK es 4.













