Paso 3: El Motor DC sin escobillas y


T = 4 * m * N * B * L * R * i , también conocido como T = Km *
afectan el diseño del motor, y ¿por qué estoy yo brutalmente golpeando par tanto? Porque es en última instancia lo que lances alrededor, y es uno de los componentes de la potencia mecánica Pm. Una vez usted determina aproximadamente la cantidad de energía mecánica tendrá, tamaño de cables y componentes apropiadamente.
Nota algunas características claves de la ecuación y cómo afectan al rendimiento del motor:
Esfuerzo de torsión aumenta con el número de vueltas N
.. .y radio del estator R
.. .y fuerza del campo magnético B
� ... y la longitud del estator L
.. .y la bobina actual i.
Lo que observamos aquí es que a un grado, puede características motor escala lineal para estimar el rendimiento de otro motor.
Se trata de "RC Hobby industria mano onda" número uno. El concepto de giros y tamaños de motor.
100mm de diámetro motor voluntad, todo lo demás en igualdad de condiciones, producir dos veces ḿas esfuerzo de torsión como un motor de 50mm de diámetro.
Un motor con 1.2T campo magnético permanente será 20% más torquey que un motor de 1T. Y así sucesivamente.
Esto tiene sus límites - no puede razonablemente asumir que puede quíntuple sus devanados y obtener 5 veces el esfuerzo de torsión - otras características magnéticas de los motores, como saturación de entran en juego. Pero, como se mostrará, no es razonable extrapolar el rendimiento de un motor de giro-por-estator-diente 25 de vuelta 20 y tal.
El bobinado LRK
En el fondo de todo, lo que estoy diseñando y haciendo es un fraccionario slot imán permanente motor trifásico de. ¿Qué el frunk significa? La ranura fraccional sólo significa que (pares de polos del imán * fases) / (número de dientes en el estator) no es un entero. Si usted entiende, usted sabe más que hacer.
Una breve explicación es que la relación de "número de dientes del estator" al "número de pares de imán" afecta fuertemente las características físicas del motor. Un "par de polos de imán" se define como dos imanes, uno con el Polo Norte radialmente hacia adentro, hacia el otro con el Polo N hacia el exterior.
Esta relación, comúnmente llamado T: 2P (para los dientes a 2 * total postes), afecta el cogging del motor, es decir, su suavidad.
Obtener un motor de cepillo de la C.C. y girar el eje - hay una cantidad mínima de esfuerzo de torsión requerido para 'hacer clic' le sobre a la siguiente posición estable. Esto es cogging. Provoca las vibraciones indeseables y efectos sobre el sistema eléctrico de orden superior, y no nos gusta.
Un tipo de motor con T: 2P cercano a 1 (pero no 1 exactamente - que resulta en un motor que no quiere moverse) substancialmente reduce cogging (para cerca de cero) y es el más popular "pequeño motor de BLDC" bobina alrededor. Se llama el bobinado LRK, después los Sres. Lucas Retzbach y Kuhlfuss, que documentó el uso de esta bobina para los constructores de aviones de modelo en el año 2001. No sólo ofrecemos cogging del punto bajo, pero también facilitar la escalabilidad y la bobina.
Aquí hay figuras de
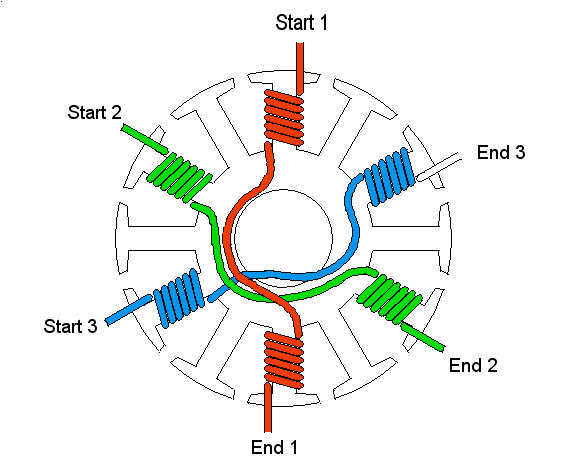
y una variante llamada
.
El punto aquí es que con un estator de 12 dientes (o ranuras, la zona entre los dientes) e 14 imanes (es decir, 7 pares de polos) le dará un motor bastante decente para comenzar con y utilizar en su incipiente carrera Ingeniería motor.
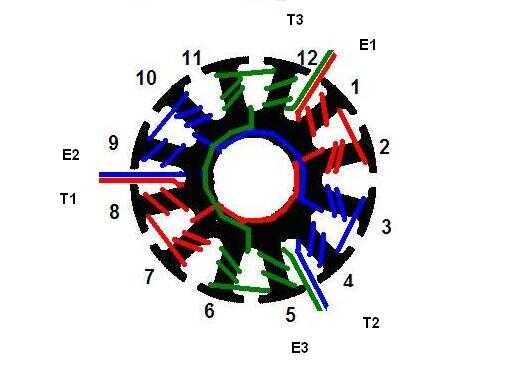
La diferencia entre los dos estilos de bobina es sutil. El bobinado LRK distribuido tiene un menor efecto de vuelta de final. Un giro final es el alambre que envuelva fuera del campo magnético con el fin de cerrar el ciclo. No contribuye par, pero tienen una resistencia (todos los cables tienen distinto de cero resistencia - no estamos hablando de los superconductores aquí). El dLRK evita agrupar que al final enciende excesivamente, que se traduce en un motor ligeramente más eficiente. Un poco como uno o dos puntos porcentuales - nada que ganarse un premio Nobel.
Por debajo es una foto de base del motor de Razer con un devanado completo dLRK.













