Paso 6: En realidad el Motor de la bobina



Un ejemplo sería el
bobina:
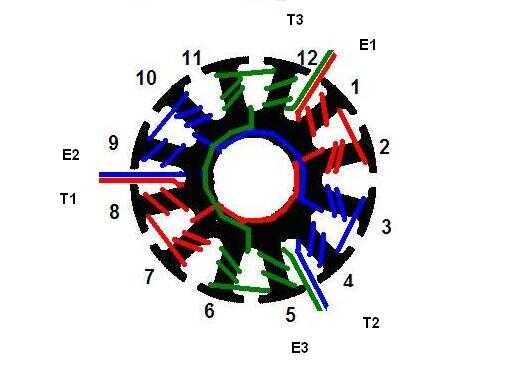
AabBCcaABbcC
o el bobinado
,
A-b-C-a-B-c
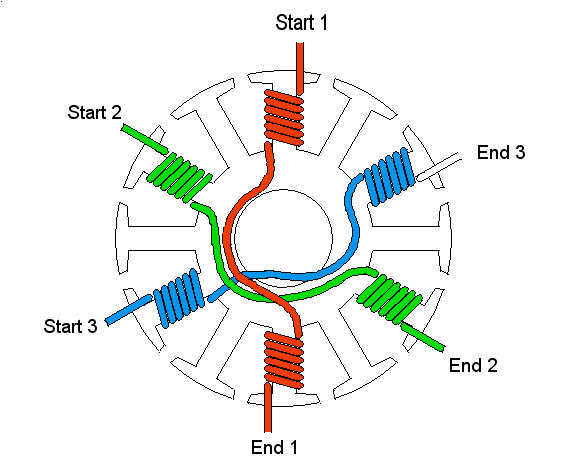
¿Qué? ¿Sólo cantan la canción del alfabeto o algo? Algo así. Las tres fases del motor se refieren en este caso como A, B y C.
Una letra mayúscula indica una bobina quiralidad, una minúscula significa la otra. Por ejemplo, si se señala A "hacer un lazo de alambre en la dirección a la derecha", entonces significa un "viento el lazo de alambre en la dirección hacia la izquierda". Y un guión o espacio significa un diente perdido.
La Convención general es mayúscula equivale a bucle hacia la derecha, minúscula equivale a bucle hacia la izquierda. Pero lo más importante es la consistencia. Si lo haces de una forma, quedarte con él.
Así que, ¿qué significa la cadena anterior de galimatías? A partir de cualquier diente (marca esto como su índice!), empezar a hacer lazos de alambre alrededor de ella según la designación. De viento estilo Aa de dos dientes, viento una de ellas hacia la derecha y el otro a la izquierda (o viceversa - seguimiento de esto.)
Hay ningún "método correcto" para obtener bobinas limpias, pero la última cosa que quieres hacer es sólo haz los cables alrededor del diente con abandono imprudente. Para motores grandes, use guantes de látex para facilitar la mano de abrasión y una clavija de madera para envolver el alambre alrededor de apalancamiento extra.
Por desgracia, no tengo actualmente ninguna foto del vídeo de mi bobina de un motor. Esto podría cambiar en el futuro para salvar a 1 mil palabras de explicación.
Quizás uno de los recursos más valiosos es la Tabla de combinación. De entrada el número de dientes del estator "(nuten del) y el número de imanes ("poste") y generará automáticamente el patrón correcto de la bobina! La tabla fue generada por uno de alemán loco R/C avión Dudes, que parecen ser la fuente de todo avance tecnológico en la escena de motor modelo.
Solo, en capas de múltiples capas
Usted puede encontrar que usted no puede conseguir el número que desea sólo una capa de alambres de la bobina en el estator . Solución simple: mantener la bobina y hacer una segunda capa.
Devanados de dos a tres capas son generalmente el límite de calefacción y refrigeración desnivel para pequeños motores, y Rm es ridículo así. Se añaden más capas, al final gire a efecto se volverá más y más de un factor.
Si usted tiene que tener al viento muchas capas, tal vez cambiar por un tamaño de alambre aliviará eso.
¿Cuántas vueltas (N) necesito?
La otra pregunta asesina de pequeño diseño del motor. Teniendo en cuenta otros parámetros del motor, puede backsolve para el N mínimo necesario para alcanzar una cierta meta de diseño, generalmente de esfuerzo de torsión. Contabilidad de pérdidas y supuestos, N debe estar por encima de este número por un cómodo margen explicado poco.
Ejemplo (Actualizado 28/03/2012 para corregir las matemáticas que ha sido mal por más de 2 años! Guardar significa que arreglarlo, entonces nunca moverse a él. En última instancia, bastantes de vosotros me llamaron hacia fuera, así que Felicidades. Aquí está la matemáticas fija usando también el nuevo esfuerzo de torsión constante m).
Digamos que quiero diseñar un motor dentro de una rueda de 12cm (0.12 m) que me deja subir un grado del 10% (o cerca de 5,5 grados de inclinación) a velocidad v = 5 m/s (alrededor de 11 mph) y pesan m = 65 kg. Es la fuerza de gravedad F me tira hacia abajo la colina
F = m * g * pecado 5,5 ° = 61N, aproximadamente. Me
Quiero subir a la colina en 5 m/s. potencia mecánica es torque * velocidad de rotación, pero también es fuerza linear * velocidad lineal.
Así Pm = 61 * 5 = 305 W
¿Parece razonable, verdad? Asumir que el motor es un transductor perfecto (no es definitivamente). La potencia eléctrica necesaria es también de 305 vatios.
Asumir mi batería es de 28 voltios, tan i = 305 W / 28 V = 10.9A
Para ejercer una fuerza lineal de 61N en un radio de 0,06 m (radio de la rueda), el par es 3.66Nm.
Dos variables, T y yo, ahora se han establecido. El motor es un 12-tooth, motor de 3 fases, por lo que m es 4 (hay cuatro dientes por fase). Ahora usted puede reducir la ecuación a
T / (4 * m * i) = N * L * R * B
R en última instancia está limitada por el tamaño de mi rotor de imán y diámetro interno de mi neumático - un tema que está próximo. Digamos que mi elección de rueda ha obligado de 70mm de diámetro máximo del estator, y el motor no puede ser más de 30mm de ancho para caber en mi vehículo.
B es mi fuerza del campo magnético. Supongamos que es 1 Tesla ahora - vamos a ver pronto que esto no es una mala conjetura si tus imanes del motor son bastante gruesos.
T / (4 * m * i * L * R) = N
Vamos a ver lo que esto viene hacia fuera.
3.66 / (4 * 4 * 10.9 * 0.03 * 0, 035) = 19.98 = N
Este valor es una primera aproximación razonable para el número de vueltas por diente que necesita. Desde fracciones de giro de precisión de centésimos no posible, tomar el número entero más cercano: 20.
Factores de violín y las olas de la mano
Cada nonideality e ineficiencia en el mundo funcionará para hacer el motor más rápido (Lea: menos torquey) que lo que el número de vueltas solo indicaría. Por lo tanto, es buen sentido considerar este como el mínimo número de vueltas por diente. El esfuerzo de torsión constante valor derivado del uso de NIBLR es generalmente 20 a 33% demasiado alto para motores fraccionarios ranura, imán permanente promedio como el tipo que estamos considerando.
Recuerde también que los motores no son transductores perfectos. El rendimiento promedio de un motor BLDC decente es en alguna parte alrededor 90%. Así, si quiero realizar esta subida con eficiencia máxima, es muy diferente a intentar en salida de energía máxima. La eficiencia de un motor de potencia de salida máxima es siempre inferior al 50%. Esto es algo a ser consciente de - si utilizas este método objetivo de salida fuerza' para el diseño de tu cuenta de vuelta, entonces usted debe tomar la velocidad para estar en algún lugar cerca de su velocidad de crucero previsto. Esto asegura que, en todo caso, usted overdesign el motor de esfuerzo de torsión como nonidealities sólo tomarlo lejos de usted.
El ejemplo anterior del motor es el motor para Proyecto de RazEr. En la actualidad, el motor de RazEr tiene 25 vueltas por diente - overspecified por aproximadamente el 25%.
Para terminar, R y L son mecánicas dictado por piezas mecánicas de su vehículo mientras m, B, N e i son electromagnéticas restricciones dictadas por su opción de imanes, alambre y el diseño de la bobina.













