Paso 3: Montar el circuito, el motor servo
El motor servo es el elemento visual clave para nuestro metrónomo. Para aquellos de ustedes que no estén familiarizados con servomotores, son un tipo de motor que tiene un control preciso sobre el que gira el brazo del servo. Esto está en contraste con un motor de DC, que no tiene un control preciso sobre la cantidad de rotación, pero puede girar mucho más rápido que los servomotores.
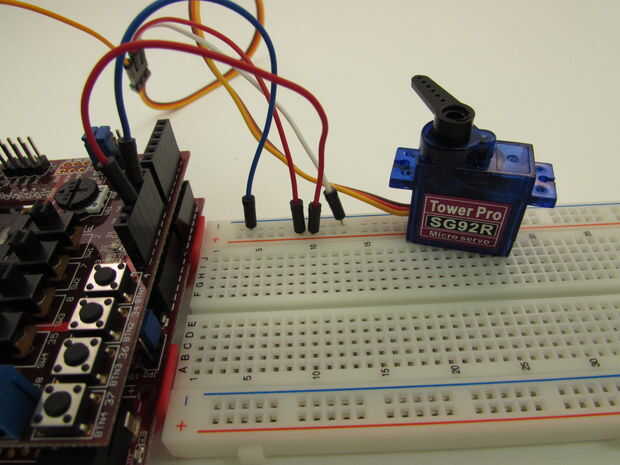
Nuestro motor de servo particular está limitada en su ángulo de rotación de entre 0 y 180 grados; perfecto para un metrónomo. Te darás cuenta que nuestro motor del servo tiene tres cables que salen de él; Estos son el cable de tierra (marrón), cable de alimentación (rojo anaranjado) y el cable de control (amarillo). Tomando ventaja de nuestros numerosos cables de puente de protoboard, conecte el cable de tierra a uno de las tiras de negativos de autobús en el protoboard y conecte el cable de alimentación a la regleta de bus de 5V.
Porque nuestro servomotor requiere una señal de modulación (PWM) de ancho de pulso, conecte el cable de control a uno de los pines digitales en la pletina de E/S básica capaz de PWM; Estos son los pines 3, 5, 6 o 9. En este circuito particular, utilizaremos pin 9. Si no sabes lo que es el PWM, eso está bien. La biblioteca de servo en nuestro código se encargará de los detalles para nosotros.




")





")
")

