Paso 7: El código del programa del Picaxe
Como actualmente está programada es el equivalente de un mando de 7 botón. Programación de diferentes inclinaciones y combinaciones de las inclinaciones, se podría crear el equivalente de 20 a 30 botones.
En este programa utiliza la inclinación de un dedo para controlar el robot hormiga hacia delante, izquierda derecha y parada. Este modo inicial se utiliza para alinear el robot con el objeto a izar. Cuando el dedo apunta hacia arriba el programa cambia al modo de recolección y luego una inclinación hacia abajo del dedo abre a la pinza y pulsos el robot hacia adelante. Cuando el dedo se señala para arriba otra vez, el robot cierra a la pinza y levanta el objeto. Ver video en el intro.
Este programa no detectar e interpretar de una manera significativa grifos, agitación o movimiento fluido que podría ser utilizado también como propuestas de control.
' Anillo de control remoto por infrarrojos Picaxe de 08 m
Loop1:
B7 = 0
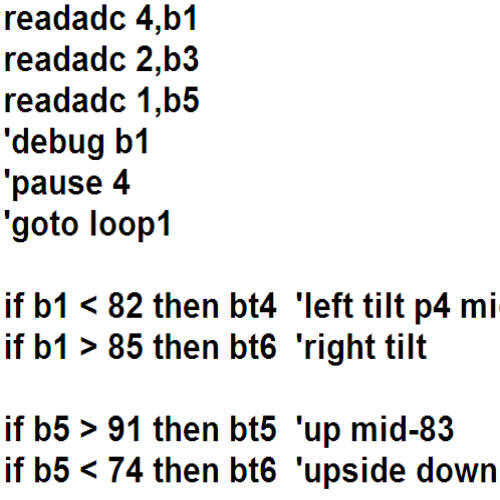
readadc 4, b1
readadc 2, b3
readadc 1, b5
' debug b1
' pausa 4
' goto loop1
Si b1 < 82 entonces bt4 ' izquierda inclinación p4 mediados-83
Si b1 > 85 entonces bt6 ' inclinación a la derecha
Si b5 > 91 entonces bt5 ' hasta mediados de la 83
Si b5 < 74 entonces bt6 ' boca abajo
Si b3 < 82 entonces bt2 ' para la inclinación
Si b3 > 86 entonces loop2 ' control de tilt-pinza de nuevo
Goto loop1
BT1:
para b7 = 1 a 10
infraout 1,0
pausa de 45
próximo b7
Goto loop1
BT2:
para b7 = 1 a 10
infraout 1,1
pausa de 45
próximo b7
Goto loop1
BT3:
para b7 = 1 a 10
infraout 1,2
pausa de 45
próximo b7
Goto loop1
BT4:
para b7 = 1 a 10
infraout 1,3
pausa de 45
próximo b7
Goto loop1
BT5:
para b7 = 1 a 10
infraout 1,4
pausa de 45
próximo b7
Goto loop1
BT6:
para b7 = 1 a 10
infraout 1,5
pausa de 45
próximo b7
Goto loop1
bt8:
para b7 = 1 a 10
infraout 1.7
pausa de 45
próximo b7
Goto loop1
Loop2: ' control de agarre
alta 0
PAUSE 1000
bajo 0
loop3:
B7 = 0
readadc 2, b3
' depurar b3
' pausa 4
' goto loop3
Si b3 < 82 entonces act3 ' para la inclinación
Si b3 > 86 entonces act4 ' tilt de nuevo
Goto loop3
act3: ' Abra la pinza y adelante
para b7 = 1 a 10
infraout 1,6
pausa de 45
próximo b7
Goto loop3
act4: ' cerrar la pinza y elevación
para b7 = 1 a 10
infraout 1,8
pausa de 45
próximo b7
Goto loop3












.")
