Paso 11: Cuello músculos y tendones (cables y servos)





Para hacer el movimiento de cabeza que decidí ir con los servos montados en la parte trasera del robot, con su fuerza aplicada a la cabeza por varillas de empuje, similares a cómo las RC aviones de controlan de sus aletas.
Elegir barras de empuje
Mi primer intento fue utilizar varillas de empuje de alambre rígido de un viejo avión RC que encontré en la chatarra, pero eran demasiado rígidas para pasar por las curvas en los tubos sin encontrar gran fricción. Después descubrí algunos cable trenzado flexible de frenos de bicicleta/engranajes que funcionaba mucho mejor. Tiene un perfecto compromiso entre rigidez (necesario para evitar demasiada flexión donde el cable está fuera del tubo) y flexibilidad (para pasar por curvas en el tubo) para esta aplicación.
Aquí es un sitio web que explica a todo tipo de conectores y cosas que la gente de plano del RC.
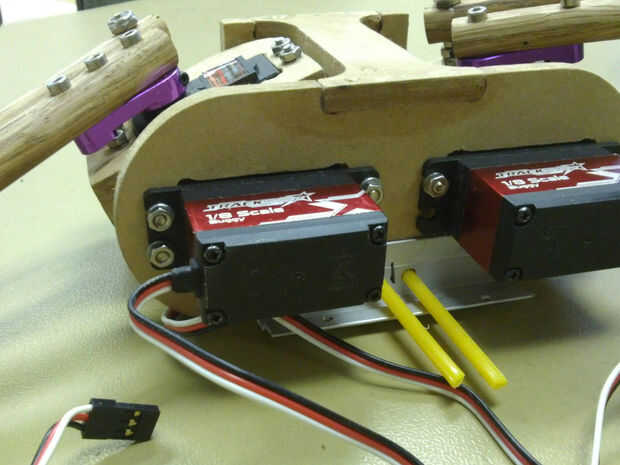
Montaje de los Servos
Opté por usar servos ala de perfil bajo, ya que la cabeza realmente no requiere de mucha fuerza para mover los ahorros de espacio eran atractivos. Montaje de estos es fácil, puesto que las lengüetas de montaje son paralelas a la bandeja de electrónica. He perforado unos agujeros de 3mm y había conectado el servo con pernos y tornillos M3.
Uno de mis servos era bastante destartalada y falta una ficha de montaje, así que pegué justo en su lugar con silicona, que funcionó bien, así que es una opción demasiado.
Localizar y taladre los orificios para Cables/varillas de empuje
Mira mis fotos para orientación, pero usted tendrá que determinar dónde se colocan los orificios para sus varillas de empuje. Tomar en cuenta lo siguiente:
- Los tubos deben tener curvas/torceduras como pocos como sea posible
- Los cables deben salir los tubos tan cerca de los servos y el cuello como sea posible, sin necesidad de que el cable de la flexión demasiado.













