Paso 1: Piezas necesarias






Electrónica
4 x Servos de alto Torque
Los servos para los brazos deben ser relativamente alto esfuerzo de torsión ya que tienen que levantar el peso del robot. También se recomienda ir para servos de rodamiento de doble si es posible. Éstos tienen un rodamiento en cada extremo del eje de salida con el fin de manejar mejor las cargas laterales.
He utilizado TrackStar TS-600 MG de HobbyKing puesto que me ha gustado el sonido de engranajes de metal y dos rodamientos de bolas. Los rodamientos de bolas resultados para ser una ficción, sin embargo, los ejes están soportados por bujes de bronce.
2 x Servos delgados
Los servos para el cuello (si decide animarlo) no tienen que levantar mucho peso, por lo que harán pequeños servos de perfil bajo. Me imagino servos 9g no estaría hasta la tarea aunque.
He utilizado Corona DS 239 MG de HobbyKing, les tuve en mano.
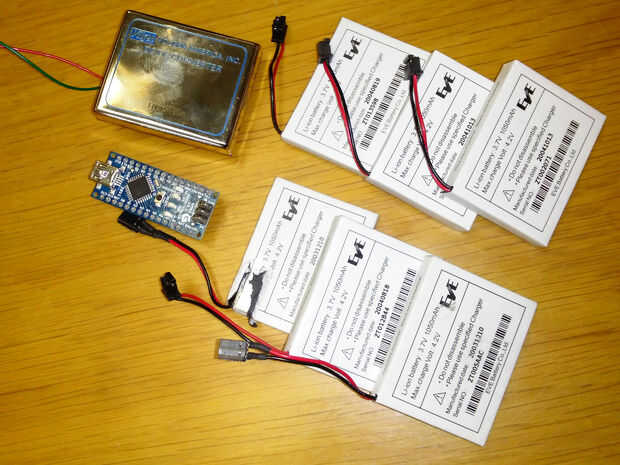
Arduino Nano
Utilizar cualquier microcontrolador que te gusta, pero soy parcial a la Arduino Nano, que se lo compro por el merecido de DealExtreme.
Baterías
Utiliza las baterías de Li-ion 4.2V x 6 que me dieron gratis (expiraron hace 10 años, pero caramba, este es un derecho de zombie?). Usted puede utilizar lo que está disponible para usted, su elección va a afectar sus requisitos de convertidor DC-DC.
Convertidor DC-DC/UBEC (circuito de eliminación de la batería Universal)
Lo que hay aquí es dependiente de las baterías, lea sección electrónica para más detalles).
Usé un obsoleto Volgen FDC15-48S05 que bajamos un trozo desechado de equipo de telecomunicaciones, por lo que es poco probable encontrar uno igual.
Si usted está utilizando baterías RC, podría utilizar un UBEC del mundo de radio control (HobbyKing tiene bastante la selección, he leído cosas buenas sobre el TURNIGY 8-15A UBEC para robots, pero nunca han intentado yo mismo)
Bobs y brocas surtidas
Conectores (para baterías)
Perfboard/placa perforada (lo obtuve de DealExtreme)
Cable aislado
pernos de cabecera de 2,54 mm (0,1") (para conectar los servos en)
De la soldadura
Cinta aislante
Encogimiento del calor
Mecánica
Asamblea de hombro y torso
MDF de 6 m m (puede utilizar acrílico, madera, aluminio, lo que usted tiene herramientas para cortar)
Pegamento de madera (si se usa madera)
Fósforos/palillos de dientes (utilizados como tacos)
Vínculos de brazo
espiga de 12mm (yo usé unos 800mm de la misma)
Aluminio Servo cuernos (DX o HK)
Acoplamiento de cuello
Cable de freno de bicicleta
Tubo del Cable de freno
EZ de conectores para cable de servo (equivalente de DealExtreme)
Primavera/Servo articulación rótula (podría utilizar alguna manguera de goma)
Sujetadores
He usado M3 tornillos (3mm) para casi todo. Si desarma vieja electrónica encontrará montones de ellos (por supuesto que son baratos como fichas para comprar también).
M3x12mm tornillos
M3x30mm tornillos
Tuercas m3 (Nylocs son muy útiles si usted puede conseguirlos)
Arandelas m3 (dividir y plano)
Estética
Muñeca
Más grande es probablemente mejor en este caso. Encontré la tienda China local y compré uno de estos cheapies con un cuerpo de tela y plástico miembros, los cuales terminaron siendo perfecto.
Zombificación
Pintura de acrílico
Paquetes de plástico (preferiblemente blanco)
Granos de maíz (para los dientes)
Silicona (u otro pegamento flexible)
Pegamento doble cara cinta













