Paso 13: Software
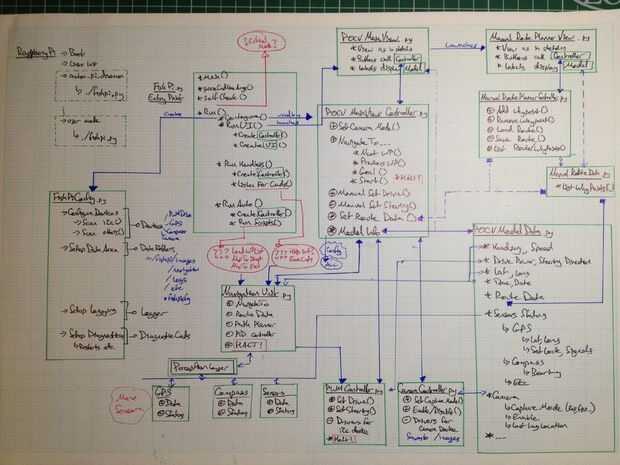


FishPi no es diferente. El software de mando y Control en desarrollo para el POCV es open source. Tenemos un repositorio en GitHub (link) donde puedes descargar una copia de su propio, o ayuda con el desarrollo y de bifurcación de nuestro repositorio. Puedes seguir las actualizaciones en desarrollo software en.
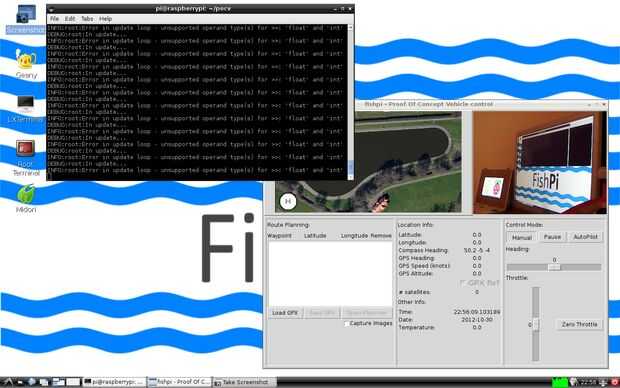
Por ahora tenemos control manual de la POCV a través del software de mando y Control. Al Gray, nuestro programador principal, está trabajando duro para ajustar el sistema para el manejo de los nuevos requisitos de distancia impuestos por la sustitución de la umbilical para un enlace Wifi.
Al final deberíamos tener un sistema capaz de navegación autónoma, comunicaciones por satélite, feeds de vídeo vivo y control remoto. El programa de comando y Control también debería funcionar en cualquier tipo de vehículo, no sólo a los barcos.
Para obtener más información sobre declaración de FishPi, Únete a nuestro foro http://fishpi.org/forum/o síganos en. También tenemos un wiki si usted está buscando la información técnica completa http://wiki.fishpi.org/





")





