Paso 2: depuración

Link de descarga de la demo de escudo de estabilizador:
http://blog.iteadstudio.com/wp-content/uploads/2015/03/Stabilizer.zip
Sólo subir el Stabilizer.ino a la ONU, I2C.ino es un archivo de ayuda cuando Stabilizer.ino compilar.
Después que cargar la demo en Iteaduino UNO, el trabajo del resto es depurar los problemas de hardware y software.
Ahora enumeramos algunos problemas comunes que nos encontramos cuando estamos haciendo este proyecto.
Problemas de hardware
Escudo de estabilizador ha sido la prueba terminantemente, así que rara vez se presentan problemas de hardware. Pero hay algunos consejos.
1. los datos de actitud leen normalmente, pero el motor no funciona. Si se produce este problema, mejor sería revisar el orden de conexión de cable del motor. Por favor vea el cuadro para aprender qué es exactamente cada pin del motor.
Cuando se utiliza una señal de salida de pulso, sólo se puede medir la velocidad del motor. Si utiliza dos señales de salida de pulso, puede medir la velocidad del motor y la dirección en el mismo tiempo.
2. no sube la demo a UNO cuando el XBee y el puente ya han enchufado protector estabilizador. Puesto que se han tomado los puertos serie, mejor desconecte jumper primero y luego subir la demo.
3. cuando quiere hacer el XBee comunicar con la PC, debe insertar jumpers en la parte B. Ya que se han tomado los puertos serie, mejor sería cargar una aplicación vacía a arduino, y entonces puede transmitirse normalmente.
Problemas de software
Depuración de software es muy importante. Se divide en cuatro partes.
- En primer lugar, leer los datos de acelerómetro y giroscopio de MPU6050 a través de I2C para obtener los datos de actitud.
- En segundo lugar, Kalman que se filtra, es decir, integrar los datos de acelerómetro y giroscopio para alcanzar el ángulo real de inclinación.
- En tercer lugar, calcular la velocidad y dirección de ruedas respectivamente. Utilizamos el algoritmo PID para calcular y controlar el movimiento del coche, para que el coche puede mantener uno mismo-equilibrio.
- Adelante, controlador de motor. Los resultados del algoritmo de PID se convertirán en comandos para manejar el motor se mueve. Puedes ver más detalles de los códigos en la demo.
Consejos para la depuración de software
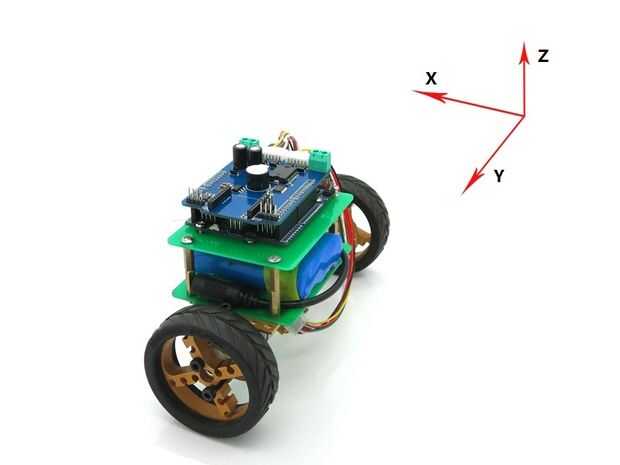
1. Preste atención al filtrado de datos de acelerómetro y giroscopio. Utilizamos tres ejes acelerómetro y giroscopio de tres ejes. Ver la imagen superior de nuestro proyecto, X es la dirección del movimiento del coche, Y es la dirección del eje y la rueda. Los datos del acelerómetro se recogerán entre el X y Z eje y el radián en ángulo. La dirección de giroscopio mantendrá en Y.
2. la dirección de ángulo calculada por acelerómetro debe ser de acuerdo con la dirección de ángulo calculada por el giroscopio, si no, el coche no se puede uno mismo-equilibrio.
3. calcular la posición de las ruedas, se debe prestar atención a la dirección así.





![Cómo hacer una mina de Airsoft/Paintball [videotutorial HD]](https://foto.askix.com/thumb/170x110.png "Cómo hacer una mina de Airsoft/Paintball [videotutorial HD]")

![Cómo para hacer un mini-UKELELE [MINI-UK]](https://foto.askix.com/thumb/170x110/7/74/774f259a6a1f33ec5d1f441d30f5eaa7.jpg "Cómo para hacer un mini-UKELELE [MINI-UK]")





