Paso 8: Conectarlo
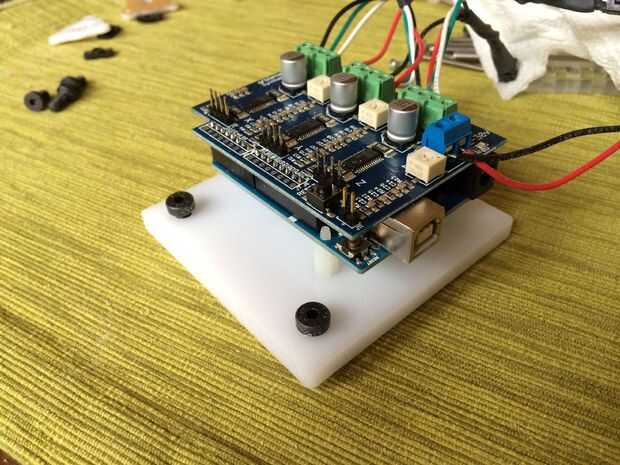
Ahora es el momento a cosas de alambre para arriba! Pop el escudo GRBL en el Arduino, entonces:
(1) alambre motores al escudo GRBL. Si sus motores no tienen conectores en ellos, usted puede sólo tomar recta a las cabeceras de tornillo. Si ya tienes un conector Mate-N-Lok (o similar) en ellos vale la pena el tiempo para hacer un adaptador. (Mate-N-Lok para alambre desnudo.) Consulte la documentación de escudo GRBL para asegurarse de que los cables de alambre correctamente.
(2) el cable de un adaptador de corriente para el escudo GRBL. Una vez más, vale la pena hacer un adaptador por lo que fácilmente puede desconectar energía del escudo. Utilicé un conector de barril de 2,1 mm.
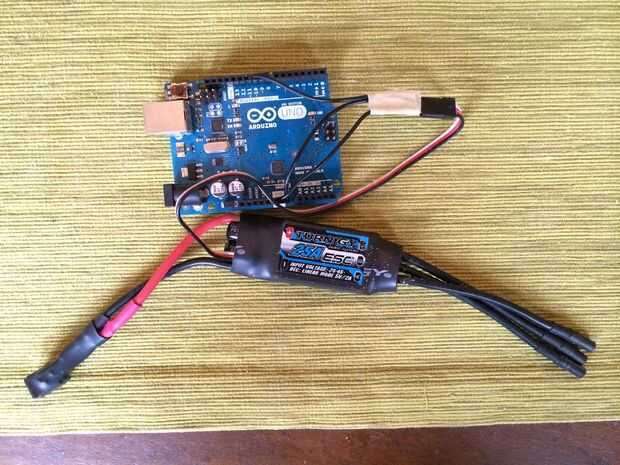
(3) Conecte el motor sin cepillo a su regulador electrónico de velocidad (ESC) usando los 3 tapones de prensa. (No te preocupes acerca de cómo el plomo asignación derecho - si las vueltas de motor la dirección equivocada cuando nos finalmente encienda usted sólo necesitará cambiar dos de estos tapones).
(4) programa 2 Arduino para el control de salida usando el bosquejo provisto autoSpindleDriver.ino. Este bosquejo envía señales de PWM para inicializar el ESC (que sonará) y luego aumenta lentamente el acelerador para acelerar el motor. Puede establecer el ritmo y la velocidad máxima por cambio de variables en el bosquejo. No conectar el Arduino al ordenador (ej. para la programación) y ESC al mismo tiempo. El ESC puede sobregirar actual de su puerto USB y dañar su computadora o Arduino. Una vez este programado el Arduino, desconecte del ordenador y conectarlo a la ESC. En mi ESC, el cable negro va a "Tierra", el cable rojo a la Arduino "Vin" y el cable blanco al pin PWM, pin 10. Arduino extraerá energía de salida una vez que el ESC es alimentado.
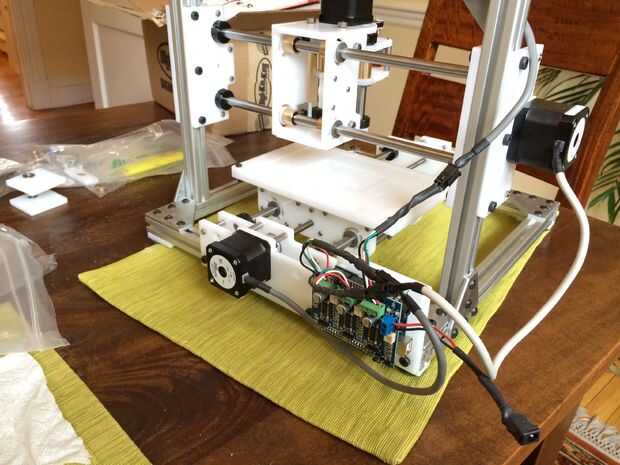
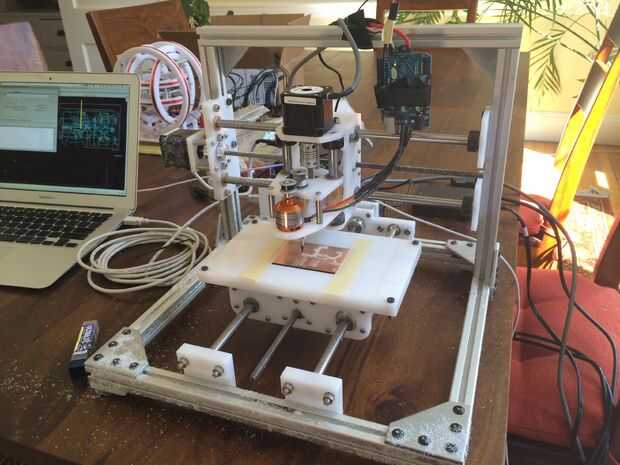
(5) enciende el ESC por enchufar la fuente de alimentación. Debe escuchar varias señales del motor, y luego comenzará a girar para arriba. Si el motor arranca, entonces de repente paradas es probablemente porque usted funcionó demasiado rápido y dibujó demasiada corriente para el ESC o el poder de la fuente. Vuelva a programar el Arduino para conducir a una velocidad más lenta y vuelva a intentarlo. Para detener el husillo, desconecte la salida de su fuente de alimentación. Si se observa el huso girando la dirección incorrecta, apague todo, intercambiar dos de los conductores de salida al motor, inténtelo de nuevo.
(6) Encienda el escudo GRBL. Instrucciones detalladas de configuración de corriente del motor y configuración GRBL para su diseño son en: https://www.synthetos.com/project/grblshield/ usted necesitará dar el escudo de alguna información acerca de su molino, como la cantidad de viajes cada paso produce. Con 200 motores de pasos/rev., husillos de rev./pulgada 20 y 8 x microstepping del escudo tendrá que producir 1259,8 pasos para mover 1 mm.

")




")






