
Construir un robot a pie utilizando el controlador de Servo inteligente
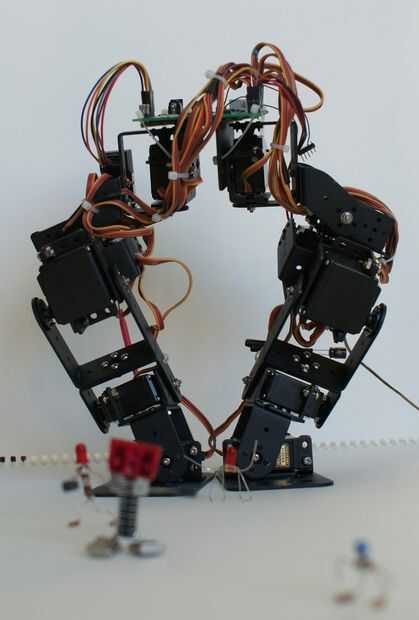
Para construir el robot que utiliza un kit de soportes del servo que llegué fuera de ebay. Que les montado en un robot de dos patas que se asemeja un poco a un mechwarrior. Cada pata está construido con 6 servomotores. Usé un radio RC de 6 canales para enviar los movimientos para caminar, inclinarse, permanente y de inclinación. Estas señales se introducen en el controlador de Servo inteligente donde los mapas y mezcla las señales de los diferentes servos.
Con un poco de práctica puedo conseguir el robot a caminar por el piso. La razón que he construido el robot era mostrar lo fácil que era usar el tablero de control que diseñé. Con el tablero de control no tienes que escribir código para conseguir que el robot más. Se basa en reglas. Los parámetros se pueden configurar muy fácil e intuitiva.
Para información más detallada sobre la salida del controlador mi campaña de kickstarter para él:https://www.kickstarter.com/projects/143152889/smart-servo-controller
También visite la página de facebook de los últimos avances y proyectos en el controlador de Servo inteligente: https://www.facebook.com/smartservocontroller





")

")

")



