Paso 3: Hacer una pinza de Robot
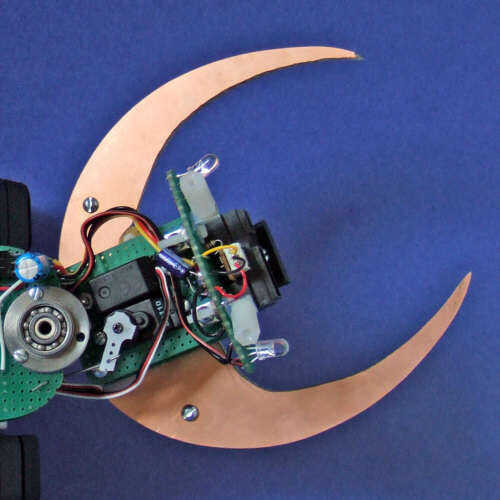
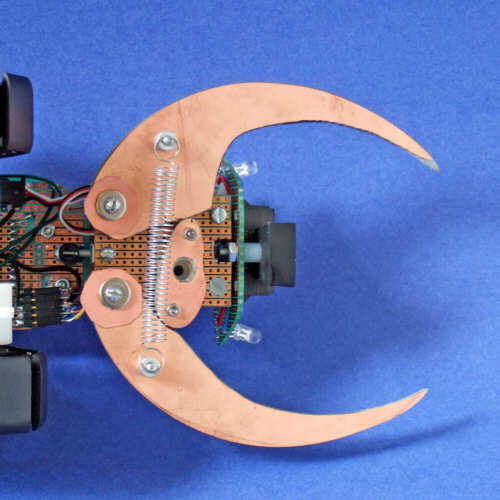
La mandíbula de la hormiga es una pinza muy simple que funciona por que se mantiene cerrada por un resorte. Una cámara en la parte inferior es rotada por un servo para abrirlo. Así, cuando se cierra la pinza abierta agarre con la fuerza del resorte y sostener firmemente sobre objetos de diferentes diámetros. Los dos lados de la pinza son bastante lisos y tiran el objeto se apoderó hacia un parachoques de fricción de caucho que impide el deslizamiento hacia abajo como se levanta el objeto.
Este diseño permite el servo hacer pivotar libremente todo el camino hacia la izquierda o hacia la derecha y no hay sensores de presión o interruptores de parada se necesitan captar un objeto.
La hormiga garra dedos y cuerpo se hicieron con material de placa de circuito de FRS con cobre. Los cojinetes de pivote son apenas 4-40 pernos a través de orificios perforados en la placa de circuito.
Las fotos del paso 3 Mostrar la parte superior e inferior de la pinza.





")

")

")



