Paso 7: Robot hormiga esquema

Aquí está la hormiga robot PDF. Las fotos miniaturas muestran que agrandado.
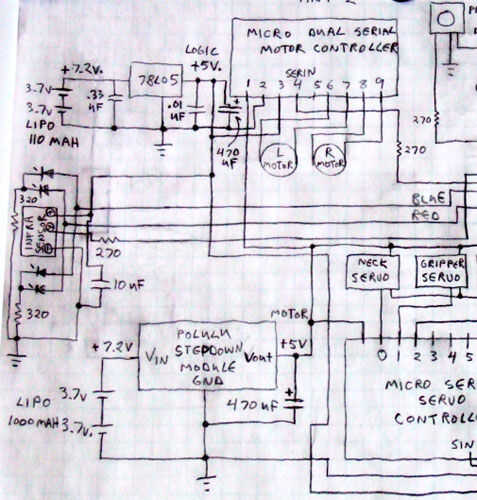
Cosas a considerar cuando la interconexión de los diferentes módulos:
Generalmente es una buena idea para mantener las fuentes de alimentación separadas para los circuitos de control y los motores. Los motores y los servos pueden ser eléctricamente ruidosos y esto puede interrumpir un microcontrolador. También es una buena idea para mantener a los microcontroladores una buena distancia de motores y servos para que no se efectúen por campos magnéticos.
Aunque no es necesario contar con un regulador de voltaje para los motores, da movimiento más consistente si el voltaje permanece constante
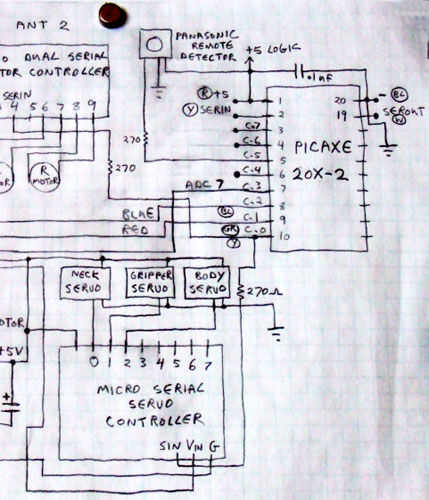
Mantener un 270 ohm resistor de 1kohm entre cualquier sensor de salidas y las entradas de Picaxe para evitar un cortocircuito accidental de cualquiera de los dispositivos.
El sensor de distancia infrarrojo Sharp resultado para ser extremadamente eléctricamente ruidosos. Cuando enganchan para arriba en un protoboard para el Picaxe, funcionó bien. Tan pronto como se instaló en el robot que el Picaxe dejó de funcionar. He resuelto el problema poniendo un condensador de 10uf en las entradas de alimentación del sensor Sharp. Esto reduce las fluctuaciones de voltaje a la fuente de alimentación que estaba creando.





")

")

")



