Paso 4: Tomar parte y acabado

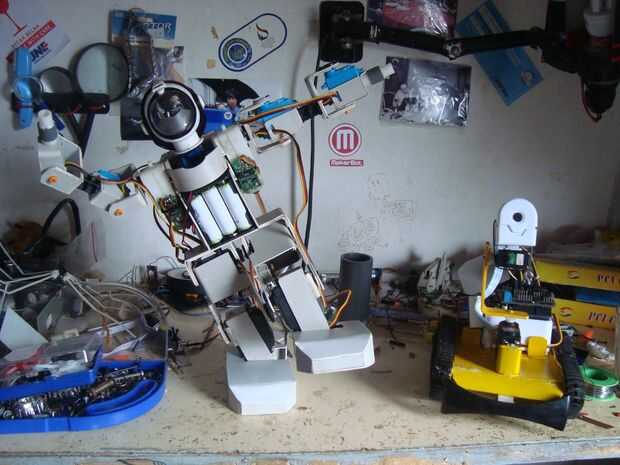





bien ahora tenemos la cabeza y bodi, pieza de la pierna y parte de la mano, unir todo con un pegamento fuerte o tornillo seguro. hacer un soporte de la batería en el cuerpo. más goog parecen alguna cubierta para el pie y el cuerpo utilizando flatt pvc, la forma del diseño desea con el poco fuego y trabajo manual.
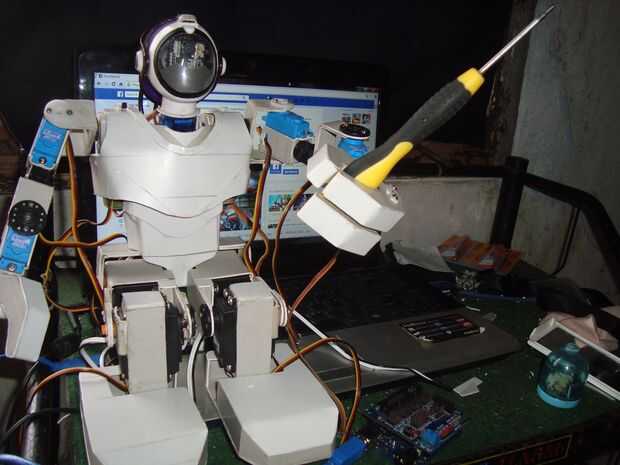
el último conectar los servos al micro y poner algún programa. Yo uso Ez-tablero para usar programa de robot de JD. lo más reciente en robótica para tomar la forma fácil y sencilla. : D
Como programa de uso de Ez: abierta ez-builder aplicación en computadora klik abierto de cloude o cosa abrir el proyecto y haga clic en un archivo de JD.ezb. que es el movimiento básico para ez-humanoide robot, puede Agregar nuevo programa con easly.
Muchas gracias,
Eric Dirgahayu







")




")