Paso 1: Cómo funciona

Así que entendamos cómo funciona el sistema.
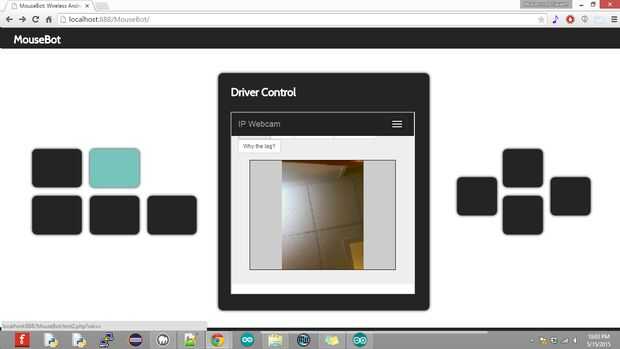
"Control remoto" del robot es una web alojada en la computadora. En esta página web, el usuario puede hacer clic en botones que hacen que el robot vaya hacia delante, hacia atrás y girar a la izquierda y derecha.
Cuando el usuario hace clic en un botón, la página web escribe un comando a un archivo txt que también está alojado en el servidor. Este archivo txt se llama keyLog.txt.
Hay un teléfono montado en el robot. Un programa en el teléfono continuamente es moverse el contenido de keyLog.txt y después desviar los datos, una USB cable, un arduino.
El arduino tiene un bosquejo sencillo que controla los motores conectados a la misma.
-Si w es inputed
ir hacia delante
-más si es inputed
ir hacia atrás
-if else una es inputed
Gire a la izquierda
-otro si d es inputed
Gire a la derecha
* Todo el código para este proyecto se haya hecho. Sólo se requerirá modificar las direcciones ip.



\"")


 una trípode de teléfono inteligente")






