Paso 3: Construir el Robot


Pongamos juntos el robot ahora. Vamos a hacer el cableado en el paso siguiente.
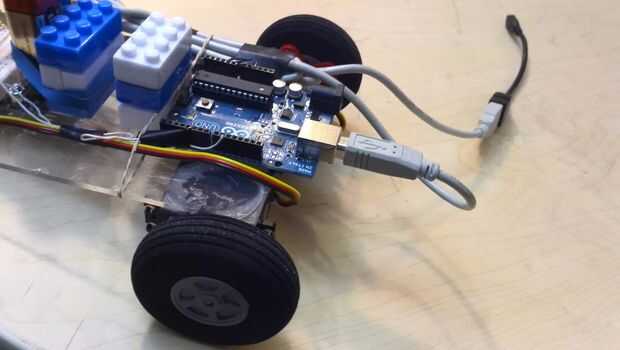
La estructura de tu robot puede variar, así que siéntase libre para ser creativo con ella! No importa la posición de la mayoría de sus componentes. Asegúrese de tener una rueda castor conectado a un extremo de tu robot y 2 motores de tren de la impulsión Unidos al otro extremo.
Agarra un pedazo de madera o plexiglás y montar tu arduino, protoboard, tren de la impulsión de motores. Acabé Velcroing mi arduino y caliente pegar mis servos y protoboard. También pegué una rueda castor al otro extremo de mi robot.
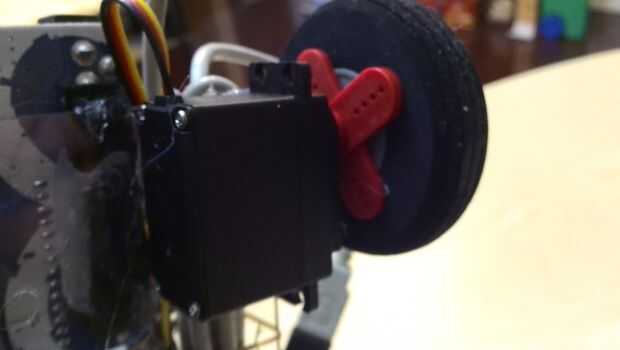
Pegamento caliente de las ruedas para el servo. Trate de que sus ruedas como centrada posible.
Conecte la batería a su protoboard. Había soldado un interruptor pequeño entre mi positivo y la placa.
Enchufe el cable OTG en tu cable USB AB y luego conecte el cable USB de AB en el arduino.
Envolvió mi cable con cinta y luego la até al robot con un elástico.



\"")


 una trípode de teléfono inteligente")






