Paso 7: Mejorar el control del robot

Puede parecer un poco tedioso golpear la tecla enter cada vez si usted quiere enviar datos a través del monitor serie. Esta fue la única desventaja del control del robot y también, no puede llevar su PC en todas partes. Así que para hacer las cosas mejor, introdujo control de joystick para el robot. Usted puede comprar un un módulo de joystick de pulgar para alrededor $2. Resto todo va a ser el mismo.
Aquí puede comprar el módulo joystick.
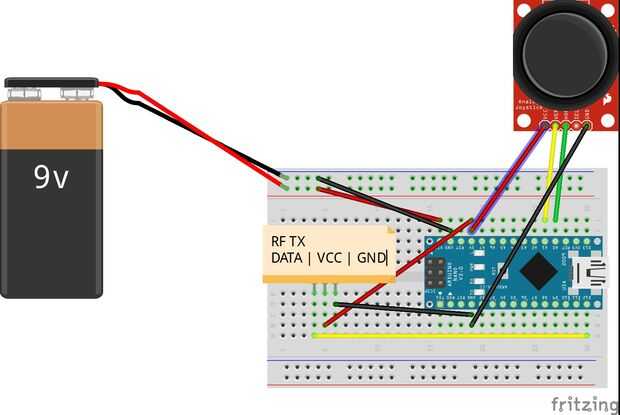
Tomar la estación base (Nano + transmisor) y conectar el joystick de pulgar a la estación base según el esquema de fritzing que hice. Una vez que todo está conectado, puede contener su controlador en una caja, o un 3 D impreso caja de lujo, si eres lo bastante afortunado como tener una impresora 3 D. Hice mía de cartón. No puede ser buena, pero funciona bien para mí.
No es necesario cambiar el código del receptor, he hecho el código del transmisor que no habrá ninguna necesidad de cambiarlo.
No tengo el interruptor pin en mi módulo joystick, así que no lo incluyo en el diagrama del circuito. Pero si lo tiene, puede asignarle algún trabajo, conectando la clavija del interruptor a cualquiera de los pines digitales, y leer el valor del interruptor con la función de digitalRead.
Primero sube el código JoystickTest en la estación base y abrir al serial monitor inmediatamente. Nota los valores para los diferentes movimientos (hacia adelante, izquierda, derecha y atrás) del serie monitor. Si tiene los mismos valores que yo, fino. Si no, cambie los valores a los valores en el código RFwithJoystick en la función 'si'.
Gracias por ver! Enviar sus consultas más abajo o email yo en vinutyagi

\"")











