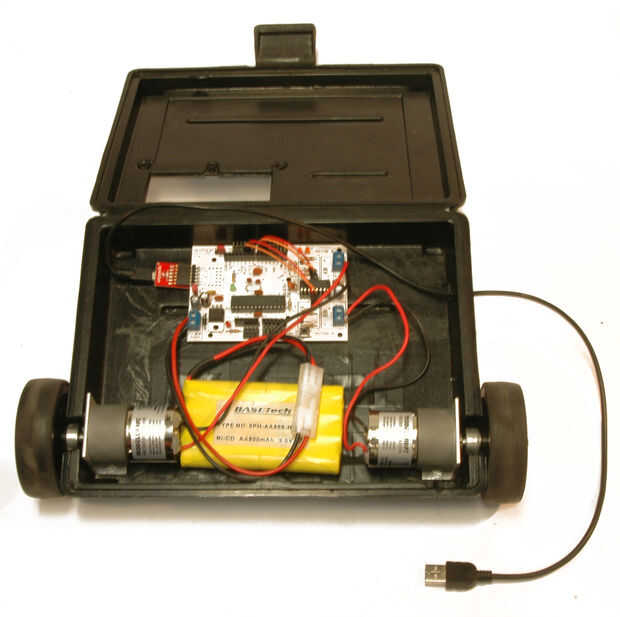
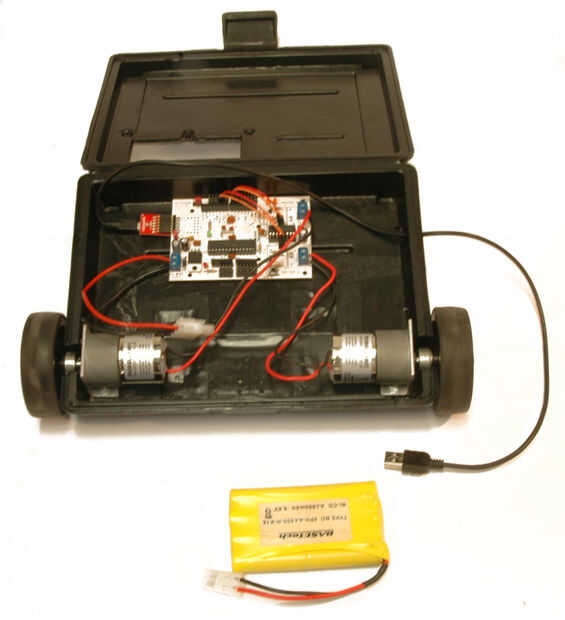
Paso 4: Colocar todo dentro de la caja



Si tiene dudas consulte esta página: http://www.guibot.pt/using-the-motoruino/ .
Entonces tienes que conectar el cable usb, si usas uno con el chip FTDI integrado sólo conéctelo dirrectly a la Junta Directiva, si está utilizando un adaptador de junta como me pusieron en su lugar y conecte el cable usb que.
Asegúrese de que se está conectando la manera correcta, deberás conectarlo frente.
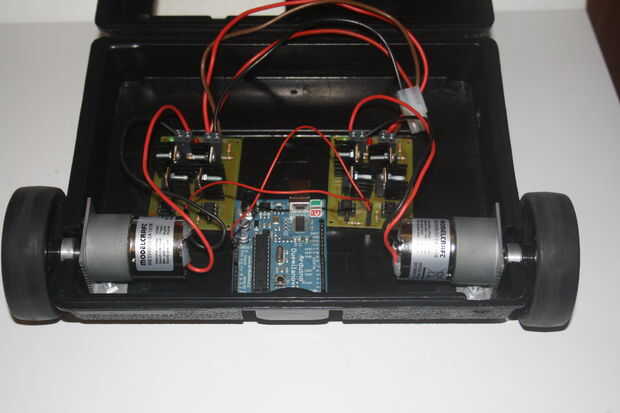
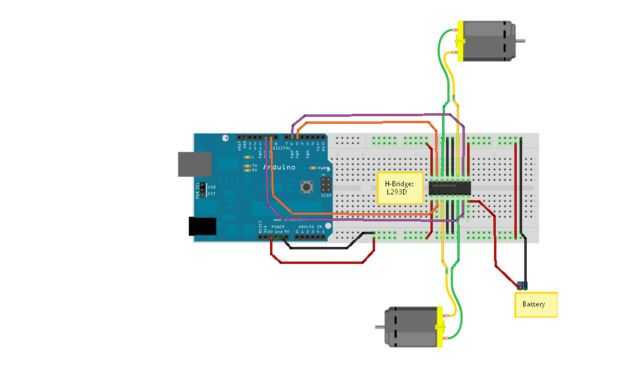
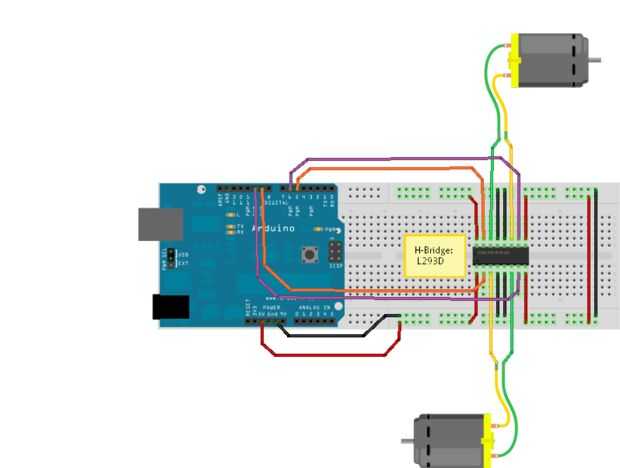
Si usted decide usar mis tablas, conecte los cables de la batería y los motores de las tarjetas de controlador de motor, como es ver las imágenes.
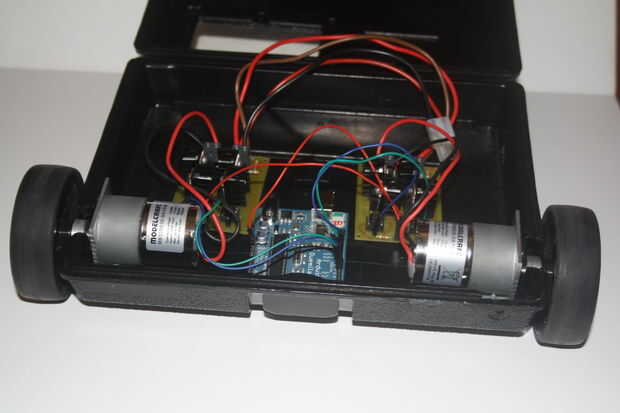
Conectar los 5V de arduino a las juntas y los puentes que vienen de las salidas PWM del arduino.
Son dos para cada motor a ser posible controlar la velocidad de rotación en ambas direcciones de rotación.
Si utilizas un L293D en un protoboard, Compruebe la imagen adjunta.
Si utilizan otros controladores, revise su hoja de datos.
Ahora la parte de hardware se realiza!













