Paso 3: Fije el Teensy
Necesita conectarse la alimentación desde el puente de H la Teensy puede opperate y necesita conectar los cables PWM a cuatro de los datos IO.
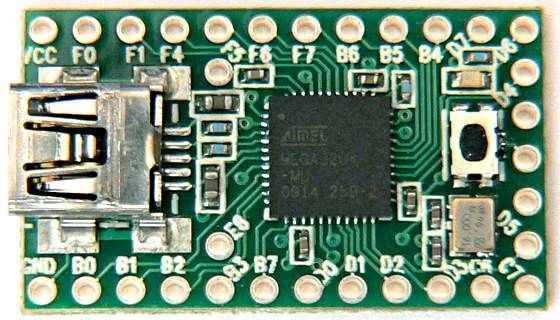
He utilizado pernos B5, B6, F7 y F6, como se indica en el tablero.
Desde aquí puede controlar el pan y tilt utilizando el teensy de puerto com compatible arduino.
Para hacer el montaje de la cacerola a la derecha primero necesita configurar la IO. Abajo se encuentra un esbozo de proyecto que hará el pan y tilt montaje vuelta constantemente a la derecha.
pan de int [] = {14, 15};
void setup()
{
pinMode (pan [0], salida);
pinMode (pan [1], salida);
}
void loop()
{
digitalWrite (pan [0], LOW); //right
digitalWrite (pan [1], HIGH); //right
}
Abajo está una lista de comandos que hacer Monte pan pan izquierda, derecha, subirlo, bajarlo y detener
pan de int [] = {14, 15};
inclinación de int [] = {16, 17};
digitalWrite (inclinación [0], LOW); //up
digitalWrite (inclinación [1], HIGH); //up
digitalWrite (inclinación [0], HIGH); //down
digitalWrite (inclinación [1], LOW); //down
digitalWrite (pan [0], HIGH); //left
digitalWrite (pan [1], LOW); //left
digitalWrite (pan [0], LOW); //right
digitalWrite (pan [1], HIGH); //right
digitalWrite (pan [0], LOW); //stop
digitalWrite (pan [1], LOW); //stop
digitalWrite (inclinación [0], LOW); //stop
digitalWrite (inclinación [1], LOW); //stop













