Paso 6: Programar el Robot
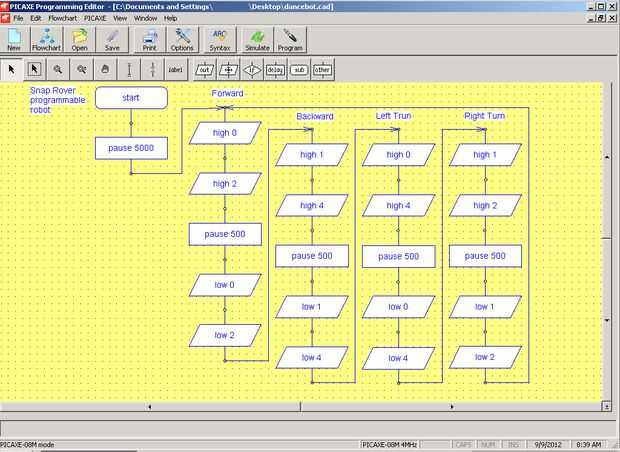


He dividido cada función en columnas para facilitar la lectura del diagrama de flujo. En la primera columna bajo "Inicio" es un comando para hacer una pausa para 5000 milisegundos así que una vez te encender el robot, esperará cinco segundos antes de proceder a través de las pruebas de motor. En la segunda columna bajo la etiqueta "Hacia adelante" son los comandos para probar la izquierda movimiento hacia delante del robot. Bajo la etiqueta de "Atrás" son los comandos para poner a prueba el movimiento hacia atrás del robot. Bajo la etiqueta "Izquierda" son los comandos para girar a la izquierda del robot. Y bajo el sello "a la derecha están los comandos para girar a la derecha el robot.
También puede convertir el diagrama de flujo en código de programa básico. Haga clic en diagrama de flujo y haga clic en convertir organigrama a BASIC. Es lo que se verá el código en BASIC (agrega los comentarios en el código para describir lo que hace el código):
' BASIC convertido de diagrama de flujo:
' C:\Documents and Settings\Desktop\dancebot.cad
' Convertido en 09/09/2012 en 8:41:37
principal:
PAUSE 5000 ' espere cinco segundos antes de continuar
label_C1: ' iniciar bucle
' ADELANTE
alto 0 ' encender el motor delantero izquierdo
High 2 ' encender motor delantero derecho
PAUSE 500 ' espera 5 segundos antes de proceder
bajo 0 ' apaga el motor delantero izquierdo
bajo 2 ' apagar motor delantero derecho
' AL REVÉS
High 1 ' interruptor motor hacia atrás a la izquierda en
alto 4 ' encender motor derecho hacia atrás
PAUSE 500 ' espera 5 segundos antes de proceder
baja 1 ' apagar el motor hacia atrás izquierda
baja 4 ' apagar el motor justo al revés
' DERECHO
alto 0 ' encender el motor delantero izquierdo
alto 4 ' encender motor derecho hacia atrás
PAUSE 500 ' espera 5 segundos antes de proceder
bajo 0 ' apaga el motor delantero izquierdo
baja 4 ' apagar el motor justo al revés
' IZQUIERDA
High 1 ' interruptor motor hacia atrás a la izquierda en
High 2 ' encender motor delantero derecho
PAUSE 500 ' espera 5 segundos antes de proceder
baja 1 ' apagar el motor hacia atrás izquierda
bajo 2 ' apagar motor delantero derecho
Goto label_C1 ' bucle final
El código es muy sencillo pero debe demostrar lo fácil que es programar el robot.
Para ejecutar el programa, asegúrese de que ajustar circuitos Deslice el interruptor S1 está apagado bien el motor izquierdo podría vuelta mientras que el programa aún está descargando para el PICAXE y accidentalmente puede desconectar el cable de programación como el robot gire a la derecha. A continuación, asegúrese de que esté encendida el Snap circuitos 9 voltios Batería bloque B5 o el programa no se descargará en el PICAXE. Conecte el Snap circuitos programación Cable USB a su ordenador.
1. Conecte el broche naranja S-en la presión en el bloque 8 del perno zócalo U14 (el portador del chip PICAXE).
2. Conecte el amarillo cierre para el cierre de salida de S en el bloque 8 del perno zócalo U14 (el portador del chip PICAXE).
3. Conecte el broche negro a la GND o negativo (-) presión en el bloque 8 del perno zócalo U14 (el portador del chip PICAXE).
En el Editor de programación PICAXE, haga clic en y haga clic en programa. Se mostrará una barra de estado para mostrar el progreso de la descarga del programa para el PICAXE.
Espere un momento al finalizar el programa de descarga y desconecte el cable de programación.
Para guardar el programa en la memoria del PICAXE, colocar el complemento opcional solo en el cierre de S en el bloque de PICAXE y conectar el opcional 100 Ohm resistencia R1 entre S en y GND (ver figura 3).
Colocar el robot en el suelo una distancia segura de cualquier obstáculo. A continuación, encienda el Snap circuitos Deslice el interruptor S1 a. Cuando estés listo para ver las pruebas de motor, encienda el Snap circuitos 9 voltios Batería bloque B5 y reloj robot realizar las pruebas de motor.










")


