Paso 7: Bono Robot circuito!
Sería bueno si su robot podría responder a los estímulos externos. Afortunadamente, puesto que utiliza el bloque de soporte de la batería desde el detector de movimiento ajustar circuitos, podemos utilizar el sensor de PIR (el bloque con la etiqueta "Movimiento Detector U7") y transistor del mismo conjunto para construir un movimiento detección de robot.
Piezas necesarias para esta build:
1 rejilla de Base plástica de 10 x 7
1 circuitos rápidos Rover
1 9 v batería de bloque B5
Control de motor 1 IC U8
1 8 pines zócalo U21 con PICAXE 08m instalado
Resistencias de 1KOhm 4 R2
1 Deslice el interruptor S1
1 Cable de programación USB
Detector de 1 movimiento bloque U7
1 Transistor NPN Q2
1 LED verde D2
9 solo broches
11 dos complemento conductores
2 tres Snap conductores
1 cuatro Snap Conductor
3 cinco Snap conductores
1 seis Snap Conductor
1 siete Snap Conductor
1 cable de puente naranja
1 cable de puente amarillo
1 cable de puente verde
1 cable de puente púrpura
Cable puente gris 1
1 puente blanco
Piezas opcionales (por lo que puede guardar el programa en la memoria del PICAXE):
2 broches de presión individuales
1 100 Ohm Resistor R1
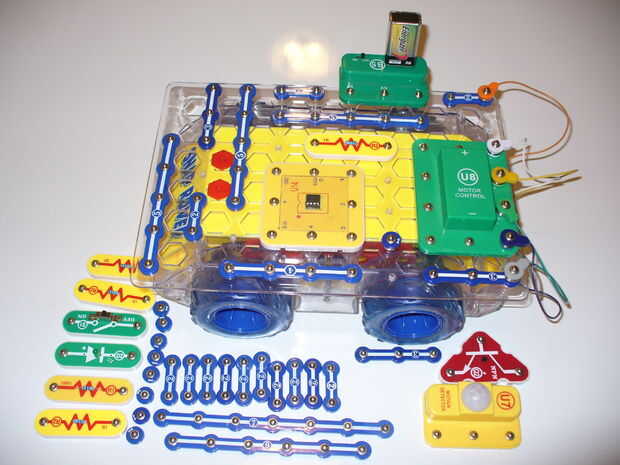
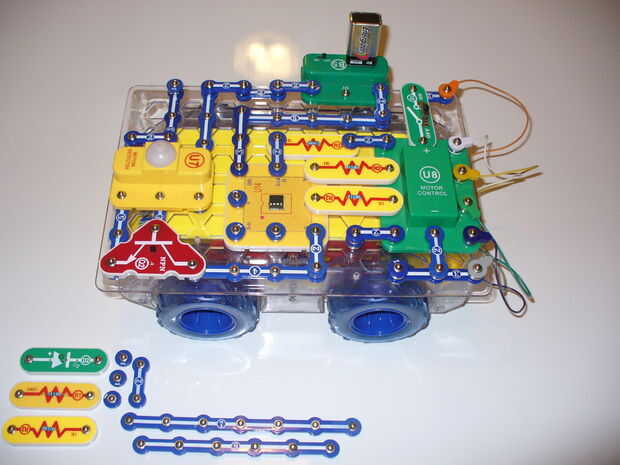
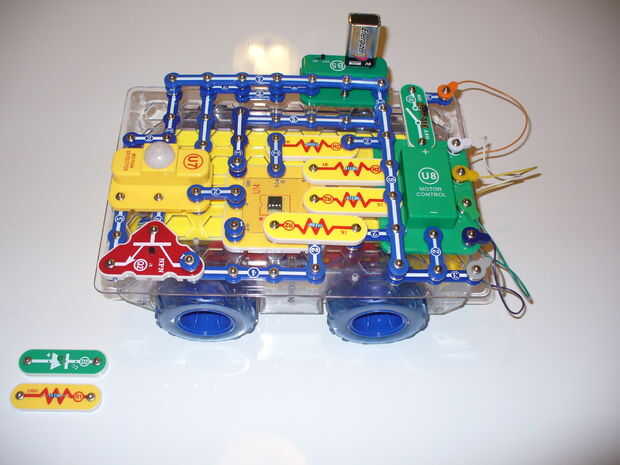
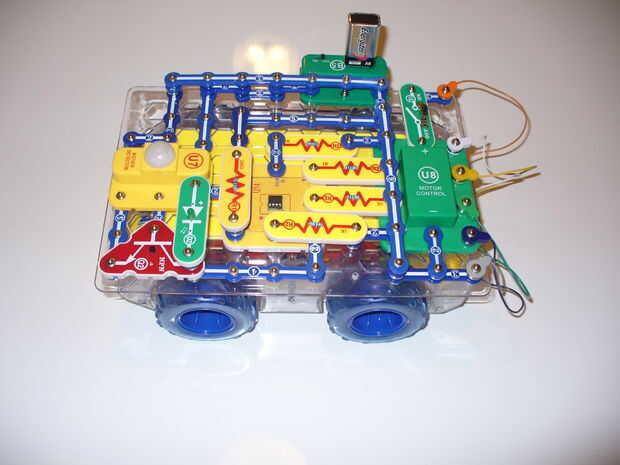
Construir el robot siguiendo los pasos que se muestra en las fotografías
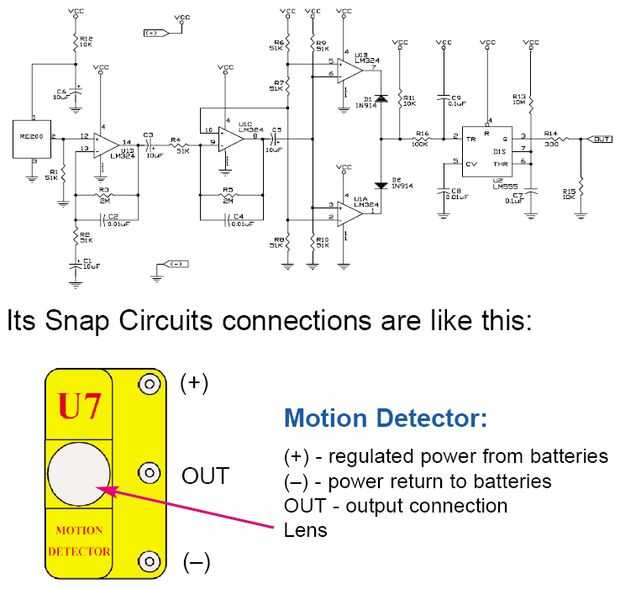
En el primer circuito, hemos utilizado cuatro de las clavijas de salida en el PICAXE para conducir los motores Rover Snap. Hay solamente dos pines izquierda--que son pernos--de la serie en (S) de entrada y contacto 3. Decidí usar el pin 3 como la clavija de entrada del bloque Detector de movimiento. Ver Figura 1 para que el circuito construido dentro del bloque Detector de movimiento. Aunque el circuito se ve complicado, hay sólo tres broches de presión en el bloque Detector de movimiento: positivo (+), hacia fuera y tierra (-). Adapté el siguiente circuito para el movimiento detectar el robot para que podría iluminar un led cuando el detector de movimiento detecta el movimiento para que el robot sea más fácil al programa (el LED se enciende para arriba cuando el detector de movimiento detecta el movimiento y todo lo que tenía que hacer era mirar la tensión en pin 3 para diferenciar Cuándo no se detectó ningún movimiento y movimiento cuando se detectó) :
www.elenco.com/admin_data/pdffiles/LED_Motion_Detector.pdf
Al escribir el programa para el movimiento detectar el robot que me di cuenta que el pin 3 tenido actual mientras el LED estaba apagado (no hay movimiento detectado), pero fue tirado abajo a 0 voltios cuando el detector de movimiento detecta el movimiento y el LED encendido para arriba. Esto casualmente hizo programación mucho más fácil. Todo lo que tenía que hacer era decirle al programa que esperar o no hacer nada, hasta que el pin 3 a bajado a 0 voltios y luego proceder a las pruebas de motor.
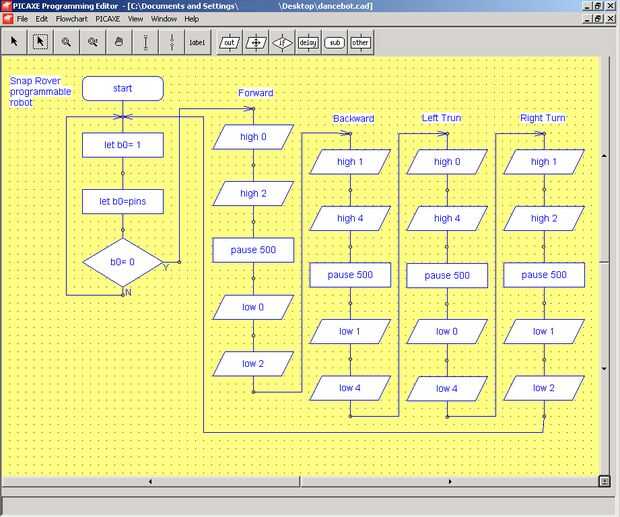
Mira el diagrama de flujo modificado en la figura 2. Notará el mismo conjunto de pruebas motor "Adelante", "Al revés", "La izquierda" y "Giro a la derecha". El bloque "Pause 5000" ha sido sustituido por el siguiente:
que b0 = 1 He añadido esto para asegurarse de que la variable b0 es mayor que cero, por lo que el programa hizo a través de las pruebas de motor go no accidentalmente antes de que el detector de movimiento detecta cualquier movimiento.
que b0 = pins asigna el valor de pines (en este caso el puerto de entrada, el pin 3) a la variable b0. Cuando no hay movimiento detectado, "pins" tiene un valor mayor que cero (realmente el valor en mi PICAXE pin 3 en este circuito es igual a 8, figura ir). Cuando se detecta movimiento, pins tiene un valor de cero.
El diamante de decisión dice lo siguiente:
Si b0 = 0 (movimiento detectado) y luego proceder a través de las pruebas de motor y cuando finalicen las pruebas motor volver al principio del programa.
Si b0 tiene un valor distinto de cero, simplemente volver al principio del programa.
Así, el robot será simplemente sentarse allí hasta que el detector de movimiento detecta el movimiento.
Cuadro 1 fuente: www.snapcircuits.net/downloads/ic_info.pdf










")


