Paso 3: Sistema de movilidad

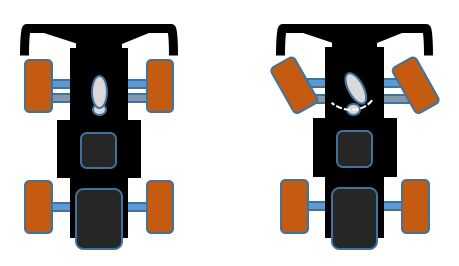

En cuanto a movilidad, los robots más común utilizan la técnica de"diferencial" que variando la dirección de giro del volante, variar la dirección del robot, pero aquí se puede ver que el coche, aunque también tiene dos motores, tiene una configuración diferente:
El motor delantero, no tiene control de velocidad, se utiliza sólo para voltear el carro de "derecha" o "izquierda", al mismo tiempo las ruedas en movimiento / sistema de eje delantero (más o menos como un automóvil). En general el coche siempre avanzar en línea recta y el motor está apagado, dejando las ruedas libres. Un comando de "gire a la izquierda" por ejemplo, se encenderá el motor, haciendo que el mecanismo de engranajes como un todo a la izquierda. Mientras funciona el motor, el coche va continuamente "giro izquierda"). El motor trasero se acopla a un sistema de engranaje de reductor de velocidad para par variable a las ruedas traseras. Las ruedas traseras siempre corren a misma velocidad y dirección.









 con Arduino y Android(bluetooth)")


