Paso 2: Instalar Python controles
Con la cámara configurar completa, tendremos que instalar unas librerías antes de que podemos ejecutar nuestros scripts.
Para Windows: Aquí hay enlaces a tutoriales de instalación de windows o páginas donde se puede encontrar el instalador de windows.
Para Ubuntu: programa de instalación puede hacerse a través de este comando:sudo apt-get install python python-opencv python-pyaudio python-pygame
Para OSX: primero instalar OpenCV y Homebrew - tuve que instalar además eigen ( brew install eigen ) para evitar errores del compilador.
A continuación, ejecutar lo siguiente:
brew install python
brew install gcc
brew install homebrew/python/pygame
brew install portaudio
Luego descargar el contenedor pyaudio para OSX e instalar así.
El repositorio:
Ahora que tenemos las dependencias fuera del camino, cabeza encima al repositorio git donde está alojado este proyecto, descargar y extraer los archivos. Abrir una ventana de comandos o terminal en el directorio con los archivos extraídos, y ejecutar cada script con los siguientes comandos, reemplazar 192.168.1.19 con la dirección IP de su cámara:
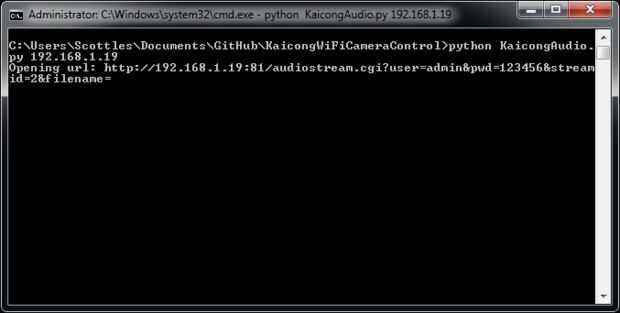
python KaicongAudio.py 192.168.1.19
Este script tira audio desde el micrófono y juega sobre los altavoces.
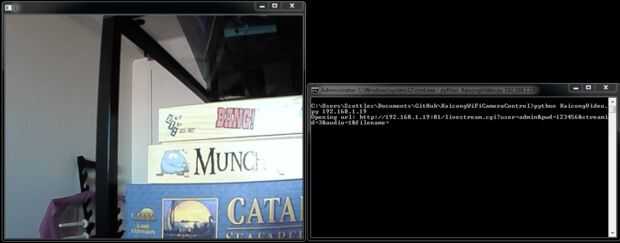
python KaicongVideo.py 192.168.1.19
Este script muestra video de la cámara y muestra en una ventana de OpenCV.
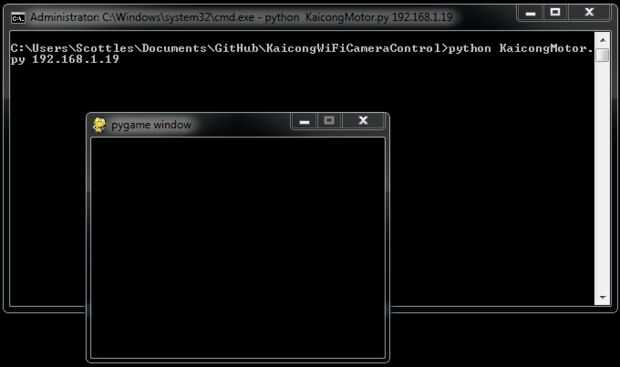
python KaicongMotor.py 192.168.1.19
Este script abre una ventana negra de Pygame. Haga clic con el ratón para que pueda capturar el teclado, luego utilice las teclas WASD para pan y tilt de la cámara!
En este punto, que ha conectado correctamente la cámara y puede interceptar el control motor, audio y video de él mediante programación. ¿Pero, cómo se hace? Siga leyendo para saber...






")






