Paso 12: Robótica inteligente coche: cableado
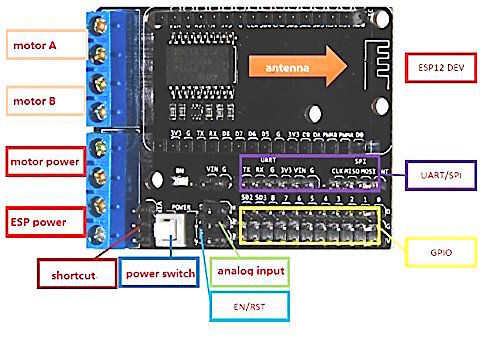
Soldar cable de conexión a los motores y en el controlador del motor por apretar los tornillos de terminal. Los motores no pueden ser dañados por cableado inverso puesto que son bidireccionales. Si el controlador del motor está trabajando hacia atrás más adelante, sólo invierta los cables para ese motor en los terminales de rosca.
Conecte la batería a los terminales de alimentación del motor escudo. Poner el jumper en su lugar permite que el controlador y los motores funcionan con las mismas pilas. El positivo (rojo) de la batería puede cablearse para pasar por el interruptor que permite el poder ser cortado en la fuente.













!")