Paso 14: Arduino.
Si desea utilizar la configuración de software que he proporcionado, en primer lugar Necesitará cargar el código de Arduino en el Arduino Mega.
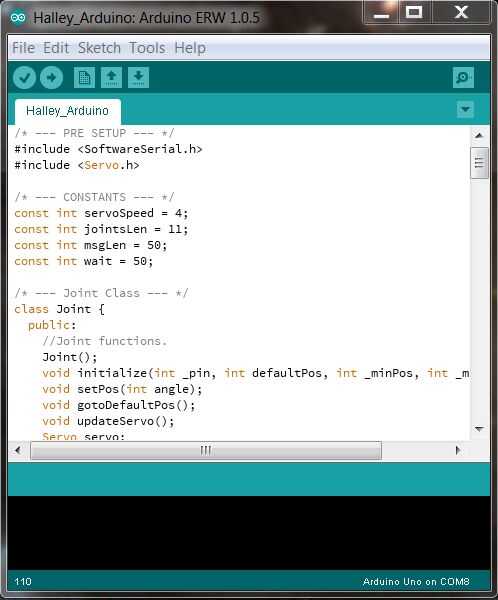
Abra el archivo Halley_Arduino.ino ubicado en la carpeta Halley_Arduino. Conectar tu Arduino a tu ordenador con su USB cable A B. Ir a herramientas y cambiar placa Arduino Mega 2560 o Mega ADK. Ir a herramientas y cambiar el puerto serie en el nombre de Arduino (en Windows, esto suele ser COM #, y en OSX, esto es generalmente /dev/tty.usbmodem#). Ahora cargar el código presionando la tecla en forma de botón en la esquina superior izquierda de la ventana del IDE de Arduino. LED de tu Arduino parpadeará un par de veces mientras se cargan el código, y el IDE de estado mostrará "Done uploading" si el dibujo se ha subido con éxito en el Arduino Mega.
Básicamente lo que hace este código es que el Arduino continuamente espere las cadenas en el formato "Pos1:Pos2:Pos3:Pos4:Pos5:Pos6:Pos7:Pos8:Pos9:Pos10:Pos11", donde cada posición corresponde a un servo junto con su posición como un entero entre 0 y 180. Una vez que el Arduino analiza los datos, se actualizará la posición de cada servo si cambió. Tenga en cuenta que sólo hay 11 servos se controla porque el código de control para que las piernas no se ha escrito todavía.




")

")






