Paso 7: Motor de inducción Linear - Resumen

Un motor de inducción linear es un motor eléctrico establecidos en una línea en lugar de girar alrededor de un eje. El son sorprendentemente pocos buenos ejemplos en la web para que podamos copiar descaradamente, así que nos vimos obligados a hacer algo mucho de ensayo y error.
Uno de los pocos ejemplos de motores de inducción lineal encontramos utiliza los motores para mover un coche de mag-lev a poca distancia bajo el control de joystick. Sin embargo, nuestro motor debe acelerar el coche lo más rápido posible para que la velocidad adquirida puede llevar es a distancia a través del tubo. Por lo que el motor no necesita ser la longitud del tubo, sólo el tiempo suficiente para conseguir el coche en movimiento rápido.
Para primeras pruebas hemos utilizado un pequeño coche de madera en las ruedas y un único conjunto de bobinas. Esto probó que podríamos hacer pasar con nuestras propias bobinas y lógica de control.
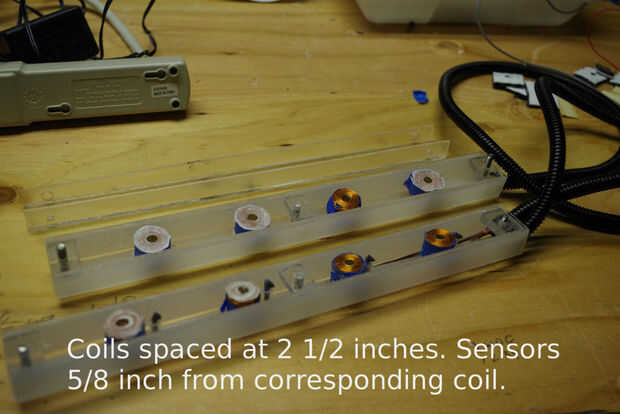
El sistema por que nos decidimos utiliza pares de sensor independiente/de la bobina. Cuando un sensor detecta un imán permanente (PM), se energiza su bobina (junto con la bobina correspondiente en el otro lado del tubo) independiente de los otros pares de bobina sensor. Espaciamiento de PMs versus bobinas se arregla para que no todas las bobinas se encenderá a la vez. Esto hace más manejables las demandas de energía y suaviza las fuerzas aplicadas al coche.
Los terminamos con los motores son dos pares de cajas de acrílico, un par unas 12 pulgadas por 1 pulgada de ancho por 3/4 pulgada de profundidad, el otro par (nuestro primer intento) 8 pulgadas de largo. Cada par motor tiene una caja que contiene otra caja que contienen sólo bobinas y sensores y bobinas. Las cajas se montan en el tubo para que el PMs en el coche pasa cerca de los sensores y las bobinas. Un Arduino Mega y tablero de energía especialmente construidos responden a los sensores y envían energía a las bobinas para dibujar al PMs a las bobinas. Cuando 13:00 se va introduciendo, su predecesor PM se empuja lejos de la misma bobina (PMs están dispuestos en la alternancia de polaridad).