Paso 5: Arduino 1: conectar la fuente de alimentación, puente H, servos, motores DC y brazo robot
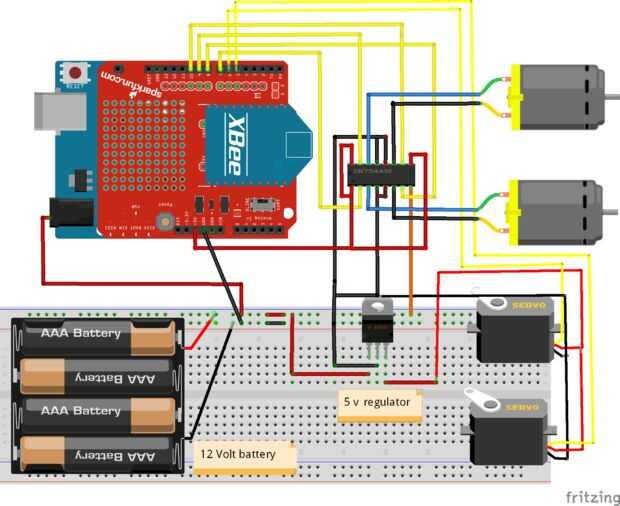



La alimentación en el robot tendrá una batería de 12v. Esto será tanto conducen el Arduino y los dos motores DC y servos, un regulador es necesario para bajar los 12 voltios de la batería de 5v que se requiere para los servos. El puente H, SN754410NE se suelda según el diagrama del circuito en una placa PCB regular. El interruptor se suelda y perfectamente a la batería.
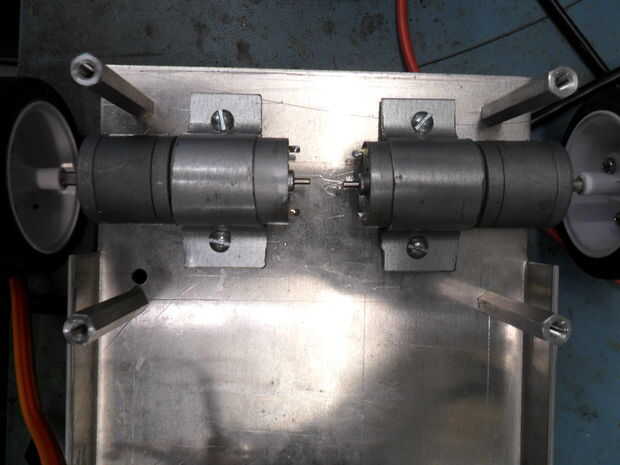
Los motores de la C.C. se pueden montar por tomar alguna pieza de metal y doblan alrededor de los motores y luego adjuntarlas a la placa base con algunos screws(picture).
Sé que la imagen es bastante desordenada así que para aclarar todo, las conexiones va como sigue:
Pines de Arduino
Pin digital nr.5 -> señal de Servo 1
Nr.6 -> señal de Servo 2
Nr.7 -> puente h pin.2
Nr.8 -> h-puente pin.7
Nr.9 -> h-puente pin.10
Nr.10 -> h-puente pin.15
Pin de 5V de arduino -> puente h pin.1, pin.9
¡ IMPORTANTE! Asegúrese de conectar todo terreno de todos juntos de las cosas por lo que comparten la misma planta (Arduino, puente H, Servos, batería y regulador). Esto puede hacerse mediante corte hacia fuera una pequeña placa PCB y conectar todos los cables de tierra a esa Junta.
Pasadores de SN754410NE
Pin 1 y pin 9 -> arduino 5V
Pin 2 -> pin Digital 7 en Arduino
PIN 3 -> Motor de la C.C. 1 +
Pin 4,5,12,13 -> tierra
PIN 6 -> Motor de la C.C. 1-
PIN 7 -> pin Digital 8 en Arduino
Pin 8 -> batería de 12 V +
PIN 10 -> pin Digital 9 de Arduino
PIN 11 -> Motor de la C.C. 2 +
PIN 14 -> Motor de la C.C. 2-
PIN 15 -> pin Digital 10 en Arduino
La hoja de datos de SN754410NE se puede encontrar aquí: http://www.ti.com/lit/ds/symlink/sn754410.pdf
Servo
Línea de señal del servo 1 -> pin Digital 6 en Arduino
Línea de señal del servo 2 -> pin Digital 7 en Arduino
Batería
Conectar a 12v positivo ambos Arduino y el puente H pin nr.9 y el regulador
Hoja de datos para el regulador se puede encontrar aquí: http://dlnmh9ip6v2uc.cloudfront.net/datasheets/Com...

")






 con pfodApp")



