Paso 2: PWM para control de servo
Para el control del servo se fija la frecuencia de la señal, y el ciclo de trabajo varía.
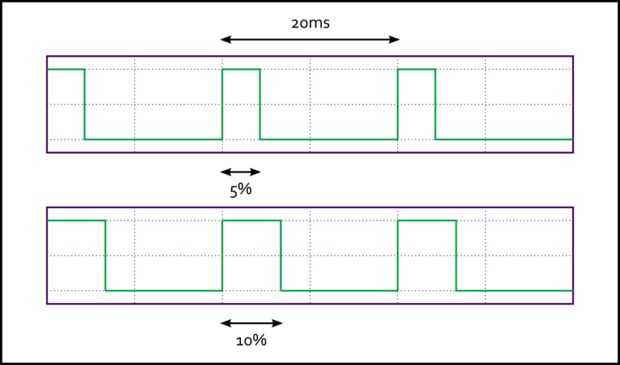
Servos aceptan una señal de control común, una onda cuadrada con una frecuencia de repetición de 20 MS y un período de (5%) de 1ms a 2ms (10%). Es el ancho del pulso en que indica qué ángulo del servo debe ser en.
Aquí está el código para configurar las dos señales extremas usando las librerías de un temporizador
- PWM (9, 51, 20000);
- PWM (9, 102, 20000);
Te cuenta que con este método hay sólo 50 pasos entre el ángulo mínimo y el máximo ángulo, esto es suficiente resolución para los sistemas más básicos. Hay mejores métodos para controlar el servo para proporcionar resoluciones más precisas pero están más allá del alcance de este instructable.













")