

Mediante servomotores de vieja escuela MG995 10, han diseñado y construir 10 grados del andar bípedo de libertad para estudiar humanoide-como caminar, correr y saltar algoritmos para robots y empuje al siguiente nivel.
Empecé con el diseño de un soporte para imprimir 3D para el servomotor MG995 destinado a dos objetivos:
1) eje de rotación de renderizado MG995 más robusto.
2) que permite la fácil creación de cadena conjunto completamente accionado gracias a un diseño innovador montaje utilizando sólo un tornillo por junta. Su solidez se debe a la fijación deslizante.
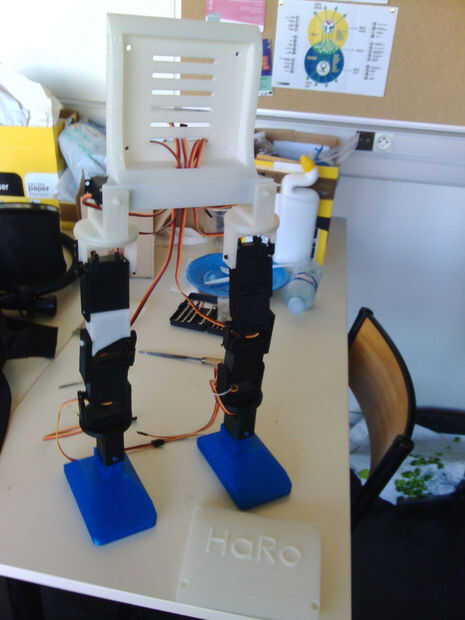
Siguiente paso es montar dos piernas y unirse a ellos en una partes del cuerpo que contiene una tarjeta electrónica de alimentación y un Pi de frambuesa para los servomotores.
Espero que podrás usarlo y aprender mucho sobre robótica con él.



")




")

![DIY - SMS pedo broma silla! [con Linkit uno]](https://foto.askix.com/thumb/170x110/a/8d/a8d41e5b85cb18dc5e003b83693d8026.jpg "DIY - SMS pedo broma silla! [con Linkit uno]")


