Paso 2: ¿Qué es ser 3D impreso?
Thanksfully, casi todo:).
Aquí está la lista:
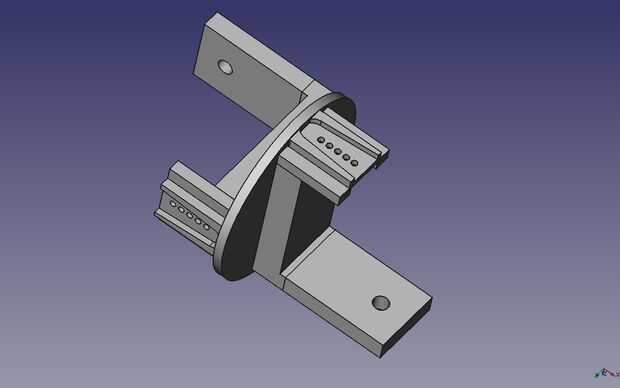
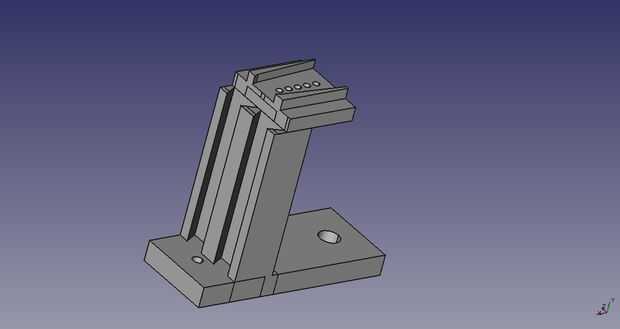
1) 2 pies, uno derecho (PiedSupportBasPivotAxeColinearderecho.stl) y uno a la izquierda (PiedSupportBasPivotAxeColinearizquierda.stl).
2) 4 uniones de 90 grados (que le conviene más entre estos dos: joint2xMotorDiff90Deg.stl y joint2xMotorDiff90DegTHICKER.stl, dado que ésta es más gruesa en el medio para que usted será capaz de cortar en el medio y generar su gcode en CURA, por ejemplo y por lo tanto deberás imprimir dos de esas partes cortadas y luego pegarlos junto con el ángulo de 90 grados. Así, la parte será fácil de imprimir con la impresora 3D, sin ningún soporte impresiones de cualquier tipo).
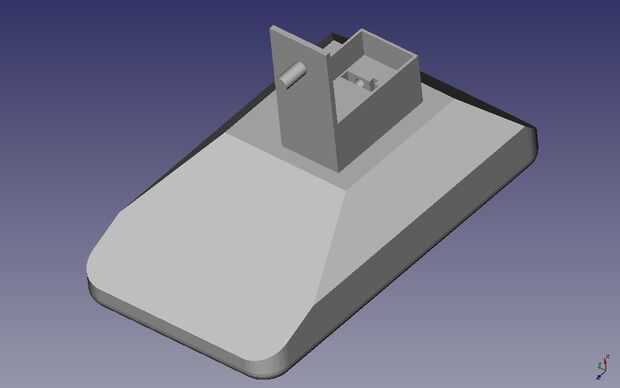
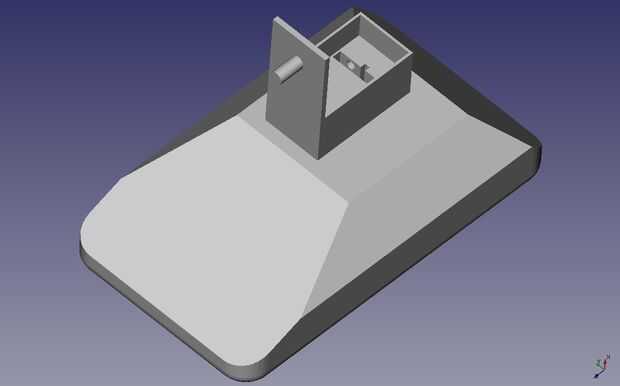
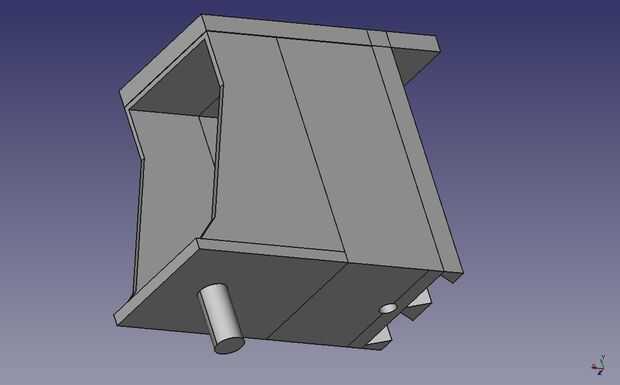
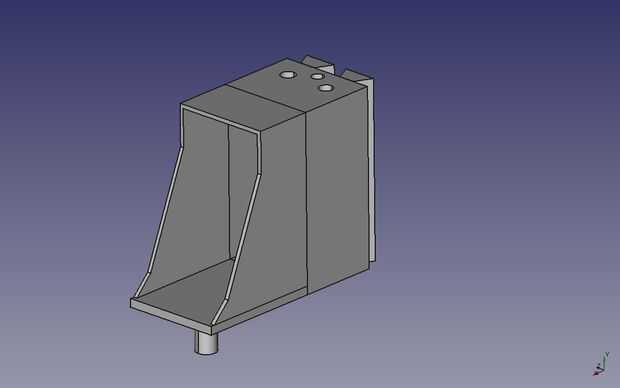
3) 4 partes inferiores del soporte del servo (SupportBasMG995v5.stl).
4) 2 partes inferiores del soporte del servo con el sistema de fijación invertida (SupportBasMG995v5INV.stl).
5) 2 parte superior del soporte del servo (SupporHautsMG995v6.2.stl).
6) quiera 3D imprimir una parte del cuerpo que será capaz de montar muy bien las dos piernas robóticas... Próximamente...
Una vez que todos han sido 3D impreso, usted encontrará intuitivamente cómo montar todas esas cosas.
Sólo deberás utilizar algunos tornillos aquí y allá entre las piezas impresas 3D que componen las articulaciones y entre los servomotores adjuntar y la parte inferior del soporte del servo.
Y eso es todo, listo.
¡Que te diviertas!



")




")

![DIY - SMS pedo broma silla! [con Linkit uno]](https://foto.askix.com/thumb/170x110/a/8d/a8d41e5b85cb18dc5e003b83693d8026.jpg "DIY - SMS pedo broma silla! [con Linkit uno]")


