Paso 5: Medir la dirección y la velocidad de giro
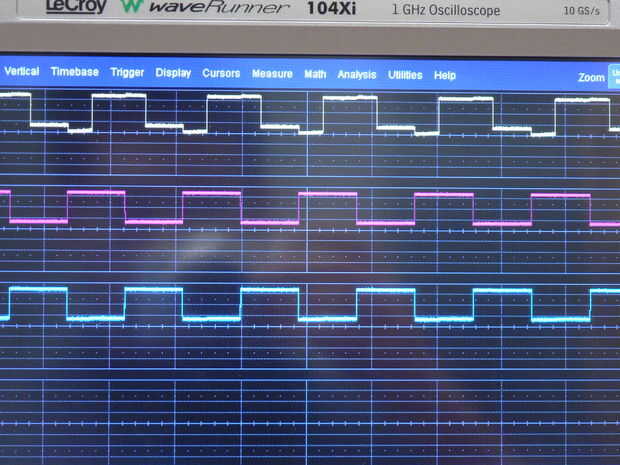
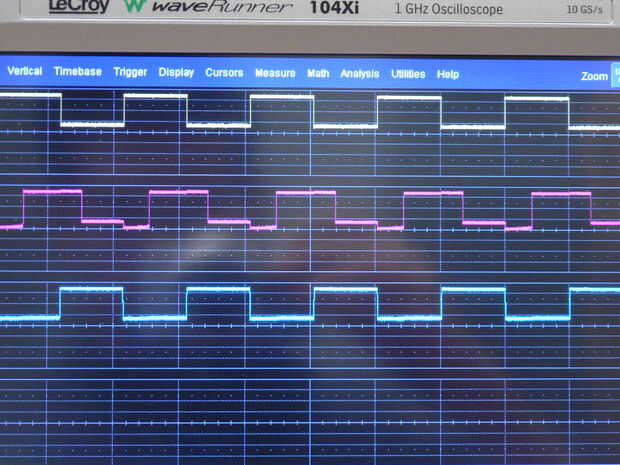


Las imágenes de abajo muestran la salida del circuito amplificador como el plato de disco duro giran a diferentes velocidades que se decae. Como la velocidad disminuye el período de la onda aumenta. Las dos primeras imágenes muestran el plato girando en diferentes direcciones. Si nos fijamos en el orden en que se producen los bordes crecientes de las olas, vemos que en la primera imagen (girar hacia la derecha) es amarillo azul rosado, mientras que en el segundo (girar hacia la izquierda) su azul rosa amarillo.
El código para el microcontrolador vigila las entradas de amplificador para un flanco ascendente. También realiza un seguimiento de qué entradas de los dos últimos bordes levantamiento ocurridos en (llamaremos a las entradas Y, P y B). Si se detecta un flanco ascendente en la entrada Y y el borde anterior de levantamiento de P y antes de eso B, sabemos que el plato gira hacia la derecha, la misma de P, B, Y y B, Y, P. por el contrario si se detecta un flanco ascendente en Y y los bordes de levantamiento dos anteriores eran de B y P respectivamente, sabemos que la dirección es en sentido antihorario y la misma de B, P, Y y P, Y, B. Otras combinaciones son considerados como ruido e ignorados.
En nuestra implementación utilizamos un microcontrolador PIC. Las entradas del amplificador están conectadas a los pines de interrupción del microcontrolador; generan una interrupción en el flanco ascendente de la entrada. Entonces nuestro código mira que entrada genera la interrupción y que insumos generan por las dos últimas interrupciones. Si se detecta un giro hacia la derecha un ' >' carácter sale a la PC, si se detecta un giro en sentido antihorario un '
Porque la frecuencia de las interrupciones depende directamente de la frecuencia de las ondas, que es proporcional a la velocidad de la fuente el software de computadora pueden trabajar a la velocidad del plato de la frecuencia en que recibe '' caracteres.













