Paso 3: código
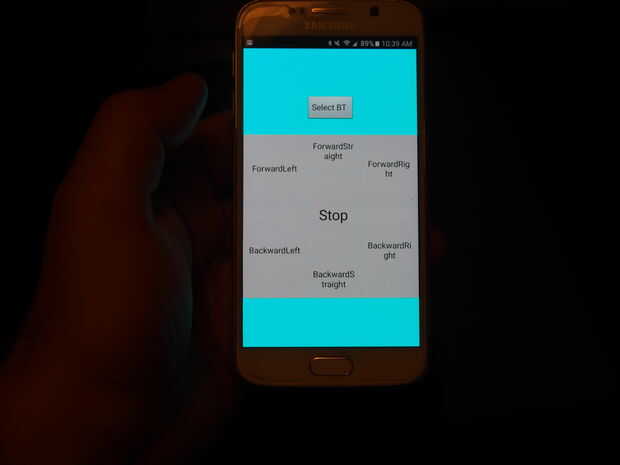
El código es bastante básico. Unas cuantas llamadas por bluetooth directo el servo de una forma u otra y que el motor de la vuelta hacia delante o hacia atrás. El inventor del MIT de la aplicación es realmente fácil de usar e increíblemente rápido de prototipo algo como esto.
Unidos son el código para el arduino y también el MIT App Inventor. También he incluido el código de arduino como archivo de texto.
Mejoras podrían incluir un slider para el ángulo de la aleta o la velocidad del motor.

")







")



