Paso 3: Sparkfun/Dagu hexápodo Chasis







Aquí encontrará las instrucciones sobre montaje del chasis hexápodo:
http://cdn.Sparkfun.com/datasheets/Robotics/Hexapo...
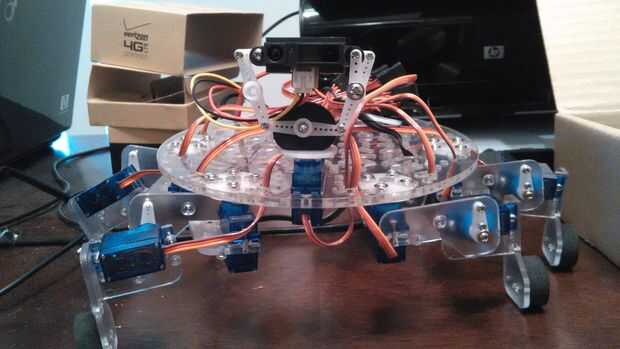
Este hexápodo camina lo hace realmente importante a la posición de cada servo en centro casi exacto si quieres evitar correcciones de error complicado en el código. De lo contrario, el hexápodo caminará torcido porque los servos no sincronizados.
Un microcontrolador de la araña se muestra en el cuadro de este chasis y es el medio recomendado de control. Decidí que sería mejor utilizar un Arduino y el protector de Servo de Adafruit. Tanto trabajar para este proyecto, pero como no he usado el controlador araña no puedo decir con certeza que no habrá ninguna complicación con el código. También me tomó algún tiempo para averiguar en qué orden para conectar los servos. Comience con la pierna hacia atrás, izquierda como 0 y continuar alrededor del círculo volviendo a la pata derecha trasera 11.
1. después de construir el chasis, conectar el Arduino con el blindaje conectado a la parte inferior del chasis (utilicé lazos de basura)
2. Pele la parte posterior del papel de la placa y pegue el lado adhesivo a la parte superior del chasis
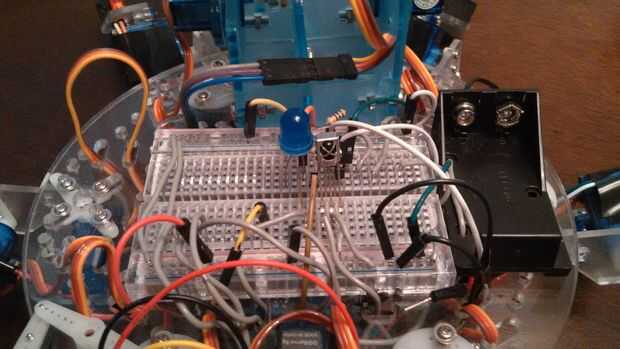
3. Conecte todas las conexiones para el Arduino con el cable 22awg los cables de alimentación aunque los orificios hacia la placa
4. Añadir el diodo receptor de infrarrojos, LED de reacción y soporte de la batería a la placa y conecte
5. Conecte el adaptador hembra de 2,1 mm al Adafruit protector usando el cable 22awg
6. Tire de los cables de la L.E.D a través de los orificios de las patas y conectar cada toma de tierra para una resistencia de 560 ohm a carril GND y VCC a un riel de 5v
7. Añadir una batería de 9 voltios y el adaptador de alimentación de 5v para el escudo y el hexápodo está listo para caminar.
Para controlar el hexápodo usando un tv remoto se le pedirá para decodificar las señales enviadas desde el control remoto. Para adaptar el código a su remoto copia sólo los valores está dado para cada botón con su botón correspondiente en el código. Un detallado tutorial para descifrar cualquier distancia se puede encontrar aquí:
")






")



")

