Paso 5: Todos los códigos
Me / códigos de brazo que utilizan cinemática inversa se pueden encontrar aquí:
https://github.com/yorkhackspace/meArm/Tree/Master...
El código para el control de los movimientos hexápodos se basa en el código de ejemplo de Dagu con modificaciones realizadas para el uso a través del escudo de Servo de Adafruit. Este enlace conduce al código que controla sólo el hexápodo.
https://github.com/bborncr/Hexapod_AdafruitShield/...
Usted tendrá que descargar algunas bibliotecas en orden para los códigos hexápodos funcione correctamente. Descargar y copiar a la carpeta de bibliotecas de los archivos de programa de Arduino y reinicie el IDE de Arduino.
Biblioteca de controladores de Adafruit_PWM_Servo - https://github.com/adafruit/Adafruit-PWM-Servo-Dri...
Biblioteca IR-Lib - https://github.com/cyborg5/IRLib/
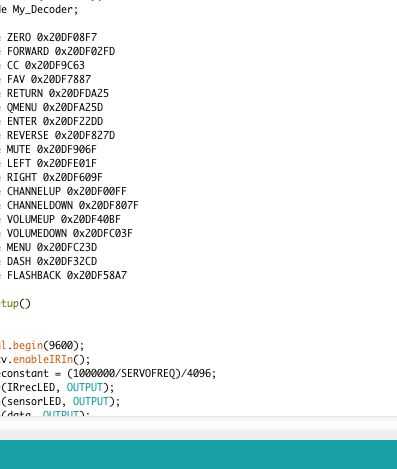
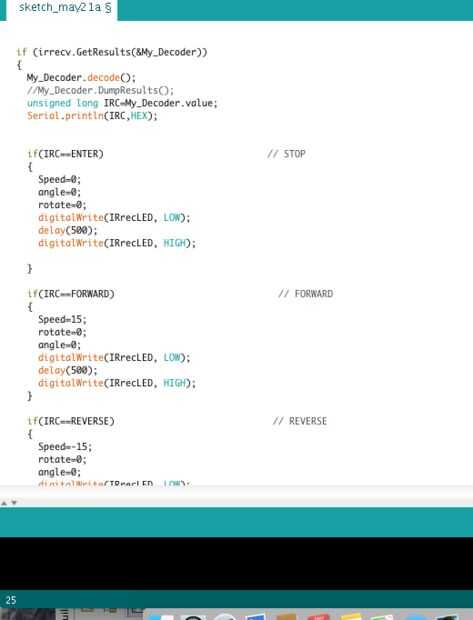
El código Final que controla Héctor puede descargarse aquí:
")






")



")

