Paso 5: Conecte el tablero de Control con Cable USB/Serial

Terminamos construyendo un circuito de interruptor simple uso de un prototipo que nos permita mover de un tirón los interruptores como se desee en cualquiera de estas configuraciones.
Utilizamos la información recopilada de esta forma escribir en Python en el módulo "Helicopter_Control.py" disponible como parte del software Puzzlebox sesiones de brainstorming .
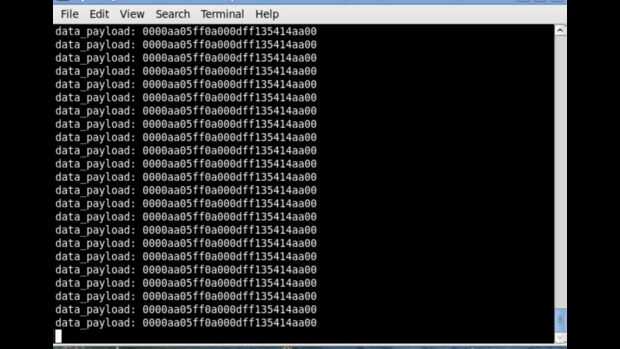
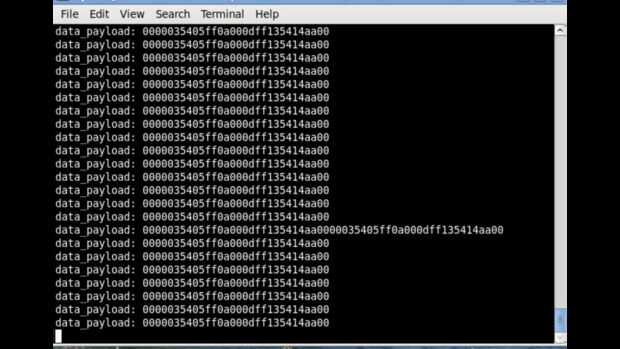
En las fotos adjuntas corrimos este módulo desde una consola ejecutando el comando "read" de la siguiente manera:
comando de Python Helicopter_Control.py--= lectura--dispositivo = / dev/ttyUSB0
Nota: en nuestra configuración específica, creado en nuestro sistema Linux cuando se sujeta el dispositivo de USB a Serial puerto serie era "/ dev/ttyUSB0" y esto puede ser diferente para su sistema específico. En Windows un COM puerto como "COM1" deba indicarse.
Cuando se ejecuta de esta manera resulta muy fácil ver los datos en tiempo real enviados desde el microcontrolador al chip transmisor. Incorporamos esta información en nuestro código fuente que arbitrariamente podríamos mando enviar cadenas a nuestro helicóptero en va.
Por cierto nos dimos cuenta de que cuando el helicóptero primero se enciende, es necesario para una cadena de comando que empareja una posición "neutral" del acelerador a repetirse enviados por el control remoto o programas informáticos, que actualmente está conectado al chip transmisor. De lo contrario el helicóptero no verán el chip transmisor y entrará en modo de sincronización (indicado por una luz azul parpadeante en el habitáculo).
También cuando se termina el comando de consola el helicóptero desconecta (la luz azul constante en salir de la cabina). Para volver a establecer la conexión es necesario una vez más transmitir una señal neutra durante aproximadamente dos segundos antes de que puede emitir un comando direccional, como "suspender" o "volar hacia adelante". Estos valores de transmisión son manejados automáticamente por el software Puzzlebox sesiones de brainstorming .

")

")



 helicóptero del vuelo.")





