Paso 7: El Software
El problema parece bastante simple a primera vista. El picador se detecta, después de unos segundos recibir permiso para aterrizar, luego de que la tierra. Cuando empiezas a mirar más de cerca el problema allí es mucho más a él. Necesita lógica para permitir que el helicóptero volar dentro y fuera de la detección por breves momentos. ¿Qué sucede si usted saque detectado? ¿Se permite? ¿Qué desencadena el temporizador de vueltas para iniciar y detener? La lista continúa.
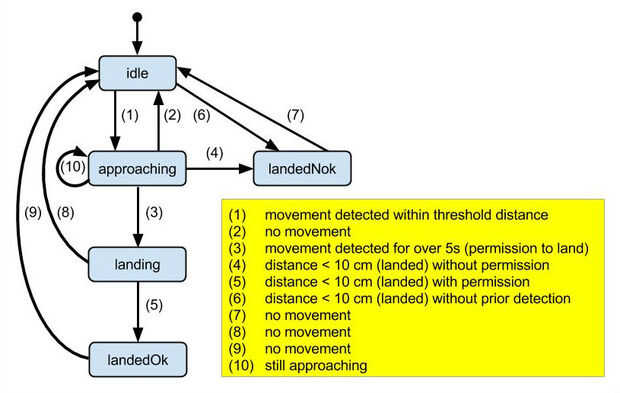
Muchas tareas de Arduino son bastante simples y no requieren mucho así que empecé de codificación. Pronto me encontré enredado en un montón de espaguetis feo if-declaraciones y contadores de tiempo y no entendía mi propio código al día siguiente. Al parecer, la tarea requieren pensamiento som. Volver a la mesa de dibujo. En el primer intento, me di cuenta, sin embargo, que el problema es un buen ejemplo de una máquina de estados finitos. Así que dibujó un diagrama y lo intentó de nuevo. Esta vez conseguí mucho mejores resultados!
El código de arduino es aquí: Helipad.ino











")

