Paso 10: Montaje de los motores
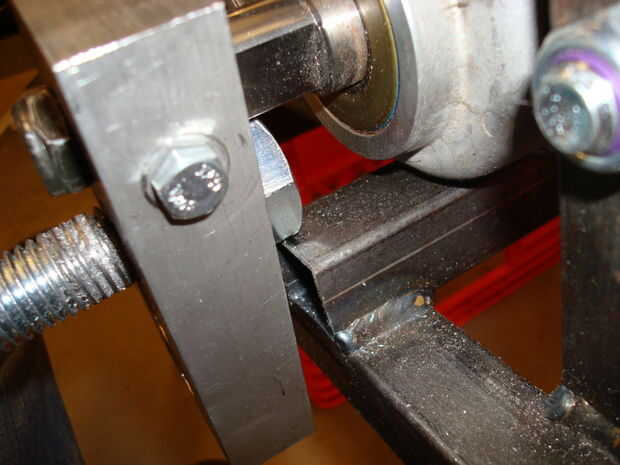







Ahora, si los agujeros no estaban perforados perfectamente (no mía), entonces el la cabeza del perno de impulsión será golpear el centro de travesaño. Antes de discutir la solución a este problema, yo quisiera regresar al paso 4 donde mencioné que no podía cambiar el tamaño de paso en mi robot. Por esta razón. Como se puede ver claramente, si el perno se coloca en otro agujero, la cabeza del perno golpearía el centro travesaño o el larguero del bastidor. Este problema es un defecto de diseño que surgió de mi dejar de lado el tamaño de la cabeza del perno al hacer mi modelo de CAD. Téngalo en cuenta si decides hacer el robot; puede modificar el tamaño o la posición de los componentes para que esto no sucede.
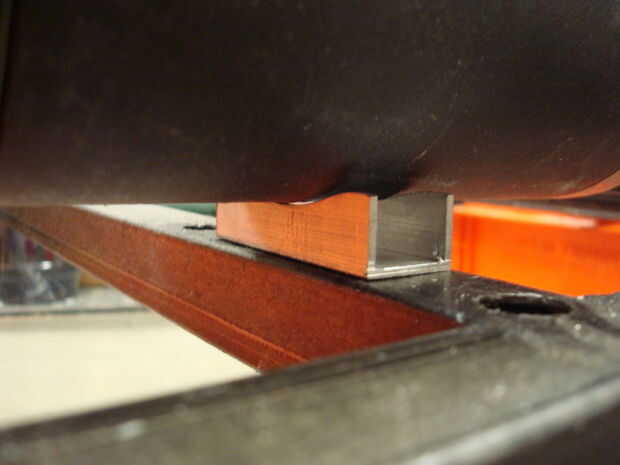
El problema de espacio de cabeza de perno inmediato puede ser aliviado mediante la adición de una pequeña canalización vertical bajo el cañón del motor sobre el travesaño. Puesto que el motor pueda girar sobre el perno de montaje principal, elevar el cañón del motor provoca el eje, para que podamos conseguir la separación necesaria. Corte un pequeño trozo de madera o metal que se levanta el motor lo suficiente como para proporcionar espacio. Luego, añadir el perno en u y asegure con tuercas de seguridad. También asegurar la tuerca en el perno de montaje principal.
Repita este paso para el otro motor.


")










