Paso 1: Modelo de CAD
![]()
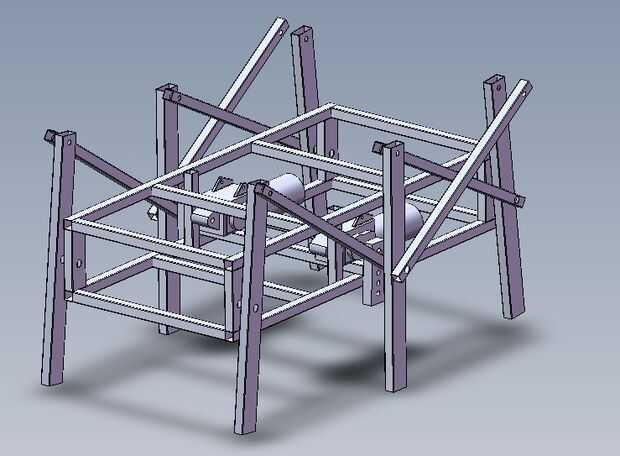
Usando SolidWorks, he creado un modelo CAD del robot para poder posicionar fácilmente componentes y determinar la ubicación de los agujeros para los pernos que conectan las piernas y los vínculos del robot a la estructura. No modelo de los pernos para ahorrar tiempo. El marco se hace de 1 "x 1" y 2 "x 1" acero tubo.
Una carpeta de pieza, ensamblaje y archivos para el robot puede descargarse a continuación. Usted necesitará SolidWorks para abrir varios archivos. Hay algunos dibujos de .pdf en la carpeta así, y también están disponibles para descargar en los pasos posteriores de este informe.


")










